Planet ROS
Planet ROS - http://planet.ros.org
Planet ROS - http://planet.ros.org![]() http://planet.ros.org
http://planet.ros.org
ROS Discourse General: Hardware Acceleration WG, meeting #2
Hello everyone,
Last June we held the first HAWG meeting with about 30 participants across organizations who joined us to learn and share experiences on how to create faster ROS 2 applications (again, note HAWG targets initially real-fast, as opposed to real-time) while powered by FPGAs and GPUs. If you couldn’t make it last time, check the recording and the minutes.
Over the last couple of months, our team at Xilinx has been working hard to deliver on the goals we committed back while creating the WG (link). We’ve made huge progress and after reaching what looks like the last steps of internal legal approvals 
 , over the comming weeks, we will be releasing in the HAWG GitHub organization various ROS 2 packages that provide fulfillment on goals #1 and #2. Moreover, following the requests submitted by some of you, we’ve added a new instant messaging chat in Matrix and backlog management using GitHub Projects that I’ll try keeping up to date. A few handy links for those of you following with the progress and/or willing to interact and contribute:
, over the comming weeks, we will be releasing in the HAWG GitHub organization various ROS 2 packages that provide fulfillment on goals #1 and #2. Moreover, following the requests submitted by some of you, we’ve added a new instant messaging chat in Matrix and backlog management using GitHub Projects that I’ll try keeping up to date. A few handy links for those of you following with the progress and/or willing to interact and contribute:
-
Objective: Drive creation, maintenance and testing of acceleration kernels on top of open standards (C++ and OpenCL) for optimized ROS 2 and Gazebo interactions over different compute substrates (including FPGAs, GPUs and ASICs). -
Reference hardware platform: Kria K26 Adaptive SOM -
Meeting invite group: ROS 2 Hardware Acceleration WG Google Group -
Instant messaging: Matrix community (Matrix is an open network for secure, decentralized communication). -
Backlog management: Phase 1: tools, examples, benchmarking and first demonstrators · GitHub -
Github organization: ros-acceleration -
Meeting minutes: HAWG minutes -
Discourse tag: wg-acceleration
To review the progress, provide more demonstrations and push the conversation further, I’m happy to call with enough time in advance for the second HAWG meeting. This second meeting will be held the 29th of September where we will review the open architecture for hardware acceleration that Xilinx contributed. Particularly, we will do so by studying step-by-step a simple use case wherein a robotics architect is trying to optimize the computation being performed in a ROS 2 node to publish the result of such computation at 10 Hz. Building upon the examples of the first meeting, we will demonstrate how hardware acceleration in FPGAs allows everyone in this community to build specialized robotic circuitry to empower faster ROS 2 Nodes. In particular, we’ll show step by step how to optimize the computations and create a pipelined dataflow using ament_acceleration and colcon_acceleration ROS 2 packages, with only minor changes in the C++ source code and a new entry in the CMakeLists.txt file to define the new acceleration kernel.
In addition, in this second meeting we will have an extra 30 minute discussion with two special guests: Christian Lienen and Marco Platzner from Paderborn University researching on reconfigurable computing and parallel architectures. They will tell us about their work around ReconROS (latest pre-print article here) which allows to build hardware ROS 2 nodes and integrate hardware acceleration in a variety of different schemes using FPGAs.
The second meeting is thereby scheduled to be 60 minutes at a friendly time in America, late afternoon in Europe and horribly bad time in Asia .We’ll be rotating friendly-hours between America and Asia if anyone requests us to do so (nobody did so far, but I’m paying attention). Coordinates for the meeting:
- Time: 2021-09-29T18:00:00Z
- Coordinates: Zoom
- Phone one-tap: US: US: +17209289299,94542052613#,0#,0409261674# or +19292056099,94542052613#,0#,0409261674#
- Meeting URL: Zoom URL
- Meeting ID: 945 4205 2613
- Passcode: =.EBjR.1%h
- Preliminary agenda:
- Welcome and newcomers intro
- Recap of ROS 2 Hardware Acceleration WG progress, quick review of objectives and acceleration avenues
- Adding new boards to the HAWG architecture progress
- Use case: robotics architect creating an accelerator for a faster ROS 2 publisher
- ReconROS, reconfigurable computing and parallel architectures in ROS 2
- Q&A
1 post - 1 participant
ROS Discourse General: Compiling Noetic for Debian Bullseye pre-release
Bullseye is officially out on the 14th, but I thought I’d try a source compile ahead of time and see how it went.
Following the instructions from the wiki, everything went pretty cleanly! My only slight hiccup was installing OGRE 1.12 instead of 1.9 initially by mistake.

I used these bullseye packages for dependencies in case anyone else would like to give it a go:
python3-vcstools python3-nose libboost1.74-all-dev libtinyxml2-dev libtinyxml-dev libqt5widgets5 libqt5x11extras5-dev libqt5core5a libqt5sensors5-dev libqt5websockets5-dev libcurlpp-dev libroslz4-dev librosbag-dev librosbag-storage-dev librosconsole-bridge-dev libroslib-dev librospack-dev librostest-dev librostlab-blast0-dev librostlab3-dev libzerg0-dev liburdf-dev liburdfdom-headers-dev liburdfdom-dev liburdfdom-tools libcollada-parser-dev liburdfdom-model-state libkdl-parser-dev libcollada-urdf-dev ogre-1.9-tools libogre-1.9-dev libyaml-cpp-dev
1 post - 1 participant
ROS Discourse General: 🔥 Ignition Gazebo + ROS 2 (August community meeting - cross-post)
Original post here.
The simulation team at Open Robotics holds monthly virtual meetings open to the community. This month, we’ll have a couple of presentations using ROS 2 with Igntiion Gazebo, so we’re cross-posting it here in case the wider ROS 2 community is interested.
Hi, community! 
Our next community meeting is coming up in the last Wednesday of August!
This month we’ll receive two guests presenting about projects that use Ignition Gazebo with ROS 2!  Both projects are using ROS 2 Foxy with Ignition Edifice.
Both projects are using ROS 2 Foxy with Ignition Edifice.
Mobile manipulators with MoveIt 2
Vatan Aksoy Tezer (@vatanaksoytezer) will present the work that PickNik Robotics is doing in collaboration with Hello Robot to simulate mobile manipulators in Ignition Gazebo using MoveIt 2. The work is currently on PickNik’s fork and will soon be upstreamed to Hello Robot’s repository.

Differential drive navigation with Nav 2
Jasmeet Singh (@jasmeet0915) will present the work that TechnoYantra has been doing to simulate differential drive robots in Ignition Gazebo using the Navigation 2 stack. You can find their work at ros2-igt.

Meeting details
 Date: 2021-08-25T17:00:00Z
Date: 2021-08-25T17:00:00Z
 Place: Virtual at Google Meet
Place: Virtual at Google Meet
 Event: Ignition community calendar
Event: Ignition community calendar
 Topic: ROS 2 + Ignition Gazebo
Topic: ROS 2 + Ignition Gazebo
 Agenda: Everyone is welcome to add items to the agenda.
Agenda: Everyone is welcome to add items to the agenda.
As always, the meeting will be recorded and posted to the community meetings playlist on the GazeboSim YouTube channel. Check out the playlist for past meetings!
Are you doing anything interesting with Gazebo? Show it off to the community! Send me a private message so we can figure out the best date.
Do you want to see some specific topic covered? Please comment below!
See you on August 25th!
The Ignition Dev Team
1 post - 1 participant
ROS Discourse General: Godot + ROS2: a Godot Module for ROS2
It’s been a dream of mine for awhile to connect the worlds of the Godot Game Engine and ROS.
This weekend I finally found some time to look into it and got something “sort of” working where you can start a node from GDScipt…just need to make it multithreaded now since spinning freezes godot 
Use cases of combining Godot and ROS are enormous:
- simulation purposes
- robot-builder games (make a game that anyone can export a URDF?)
- website buildiing (godot can export to html5)
and the list goes on…
Posting here for anyone who also is interested, might want to help out or might find this a good “head start” for something else you’d want to make!
1 post - 1 participant
ROS Discourse General: New packages for Foxy Fitzroy 2021-08-04
We’re happy to announce new packages for Foxy Fitzroy!
Package Updates for foxy
Added Packages [37]:
- ros-foxy-backward-ros: 1.0.1-1
- ros-foxy-lua-vendor: 0.0.1-2
- ros-foxy-moveit: 2.2.1-1
- ros-foxy-moveit-core: 2.2.1-1
- ros-foxy-moveit-kinematics: 2.2.1-1
- ros-foxy-moveit-planners: 2.2.1-1
- ros-foxy-moveit-planners-ompl: 2.2.1-1
- ros-foxy-moveit-plugins: 2.2.1-1
- ros-foxy-moveit-ros: 2.2.1-1
- ros-foxy-moveit-ros-benchmarks: 2.2.1-1
- ros-foxy-moveit-ros-move-group: 2.2.1-1
- ros-foxy-moveit-ros-occupancy-map-monitor: 2.2.1-1
- ros-foxy-moveit-ros-perception: 2.2.1-1
- ros-foxy-moveit-ros-planning: 2.2.1-1
- ros-foxy-moveit-ros-planning-interface: 2.2.1-1
- ros-foxy-moveit-ros-robot-interaction: 2.2.1-1
- ros-foxy-moveit-ros-visualization: 2.2.1-1
- ros-foxy-moveit-ros-warehouse: 2.2.1-1
- ros-foxy-moveit-runtime: 2.2.1-1
- ros-foxy-moveit-servo: 2.2.1-1
- ros-foxy-moveit-simple-controller-manager: 2.2.1-1
- ros-foxy-pmb2-2dnav: 3.0.1-1
- ros-foxy-pmb2-bringup: 4.0.2-1
- ros-foxy-pmb2-controller-configuration: 4.0.2-1
- ros-foxy-pmb2-description: 4.0.2-1
- ros-foxy-pmb2-maps: 3.0.1-1
- ros-foxy-pmb2-navigation: 3.0.1-1
- ros-foxy-pmb2-robot: 4.0.2-1
- ros-foxy-ros-ign-interfaces: 0.221.2-1
- ros-foxy-rtabmap: 0.20.13-1
- ros-foxy-run-move-group: 2.2.1-1
- ros-foxy-run-moveit-cpp: 2.2.1-1
- ros-foxy-run-ompl-constrained-planning: 2.2.1-1
- ros-foxy-usb-cam: 0.4.0-1
- ros-foxy-webots-ros2-control: 1.1.0-1
- ros-foxy-webots-ros2-driver: 1.1.0-1
- ros-foxy-webots-ros2-mavic: 1.1.0-1
Updated Packages [96]:
- ros-foxy-ament-index-cpp: 1.0.2-1 → 1.1.0-1
- ros-foxy-ament-index-python: 1.0.2-1 → 1.1.0-1
- ros-foxy-bosch-locator-bridge: 2.0.1-1 → 2.0.2-1
- ros-foxy-can-dbc-parser: 1.1.0-1 → 1.1.1-1
- ros-foxy-cascade-lifecycle-msgs: 0.0.7-4 → 0.0.8-1
- ros-foxy-compressed-depth-image-transport: 2.3.0-1 → 2.3.1-1
- ros-foxy-compressed-image-transport: 2.3.0-1 → 2.3.1-1
- ros-foxy-diff-drive-controller: 0.4.0-1 → 0.4.1-1
- ros-foxy-effort-controllers: 0.4.0-1 → 0.4.1-1
- ros-foxy-filters: 2.0.0-1 → 2.0.2-1
- ros-foxy-force-torque-sensor-broadcaster: 0.4.0-1 → 0.4.1-1
- ros-foxy-forward-command-controller: 0.4.0-1 → 0.4.1-1
- ros-foxy-gripper-controllers: 0.4.0-1 → 0.4.1-1
- ros-foxy-gurumdds-cmake-module: 1.0.3-1 → 1.0.4-1
- ros-foxy-image-transport-plugins: 2.3.0-1 → 2.3.1-1
- ros-foxy-imu-sensor-broadcaster: 0.4.0-1 → 0.4.1-1
- ros-foxy-joint-state-broadcaster: 0.4.0-1 → 0.4.1-1
- ros-foxy-joint-state-controller: 0.4.0-1 → 0.4.1-1
- ros-foxy-joint-trajectory-controller: 0.4.0-1 → 0.4.1-1
- ros-foxy-launch-pal: 0.0.2-3 → 0.0.4-1
- ros-foxy-launch-system-modes: 0.8.0-1 → 0.9.0-1
- ros-foxy-librealsense2: 2.45.0-1 → 2.48.0-1
- ros-foxy-mavlink: 2021.6.6-1 → 2021.7.7-1
- ros-foxy-moveit-common: 2.1.4-1 → 2.2.1-1
- ros-foxy-plansys2-bringup: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-bt-actions: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-core: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-domain-expert: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-executor: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-lifecycle-manager: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-msgs: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-pddl-parser: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-planner: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-popf-plan-solver: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-problem-expert: 1.0.9-1 → 1.0.10-1
- ros-foxy-plansys2-terminal: 1.0.9-1 → 1.0.10-1
- ros-foxy-position-controllers: 0.4.0-1 → 0.4.1-1
- ros-foxy-raptor-dbw-can: 1.1.0-1 → 1.1.1-1
- ros-foxy-raptor-dbw-joystick: 1.1.0-1 → 1.1.1-1
- ros-foxy-raptor-dbw-msgs: 1.1.0-1 → 1.1.1-1
- ros-foxy-raptor-pdu: 1.1.0-1 → 1.1.1-1
- ros-foxy-raptor-pdu-msgs: 1.1.0-1 → 1.1.1-1
- ros-foxy-rc-genicam-api: 2.5.0-1 → 2.5.6-1
- ros-foxy-rc-genicam-driver: 0.1.2-1 → 0.2.0-1
- ros-foxy-rcdiscover: 1.1.2-1 → 1.1.4-1
- ros-foxy-rclc: 1.0.0-1 → 1.0.2-1
- ros-foxy-rclc-examples: 1.0.0-1 → 1.0.2-1
- ros-foxy-rclc-lifecycle: 1.0.0-1 → 1.0.2-1
- ros-foxy-rclcpp-cascade-lifecycle: 0.0.7-4 → 0.0.8-1
- ros-foxy-realsense2-camera: 3.2.1-1 → 3.2.2-1
- ros-foxy-realsense2-camera-msgs: 3.2.1-1 → 3.2.2-1
- ros-foxy-realsense2-description: 3.2.1-1 → 3.2.2-1
- ros-foxy-rmw-gurumdds-cpp: 1.0.6-1 → 1.0.9-1
- ros-foxy-rmw-gurumdds-shared-cpp: 1.0.6-1 → 1.0.9-1
- ros-foxy-ros-ign: 0.221.1-1 → 0.221.2-1
- ros-foxy-ros-ign-bridge: 0.221.1-1 → 0.221.2-1
- ros-foxy-ros-ign-gazebo: 0.221.1-1 → 0.221.2-1
- ros-foxy-ros-ign-gazebo-demos: 0.221.1-1 → 0.221.2-1
- ros-foxy-ros-ign-image: 0.221.1-1 → 0.221.2-1
- ros-foxy-ros2-controllers: 0.4.0-1 → 0.4.1-1
- ros-foxy-ros2bag: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-compression: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-converter-default-plugins: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-cpp: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-storage: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-storage-default-plugins: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-test-common: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-tests: 0.3.7-1 → 0.3.8-1
- ros-foxy-rosbag2-transport: 0.3.7-1 → 0.3.8-1
- ros-foxy-rqt-publisher: 1.1.2-1 → 1.1.3-1
- ros-foxy-shared-queues-vendor: 0.3.7-1 → 0.3.8-1
- ros-foxy-sqlite3-vendor: 0.3.7-1 → 0.3.8-1
- ros-foxy-system-modes: 0.8.0-1 → 0.9.0-1
- ros-foxy-system-modes-examples: 0.8.0-1 → 0.9.0-1
- ros-foxy-system-modes-msgs: 0.8.0-1 → 0.9.0-1
- ros-foxy-teleop-twist-joy: 2.4.2-1 → 2.4.3-1
- ros-foxy-test-launch-system-modes: 0.8.0-1 → 0.9.0-1
- ros-foxy-theora-image-transport: 2.3.0-1 → 2.3.1-1
- ros-foxy-velocity-controllers: 0.4.0-1 → 0.4.1-1
- ros-foxy-warehouse-ros: 2.0.1-1 → 2.0.3-1
- ros-foxy-webots-ros2: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-abb: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-core: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-demos: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-epuck: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-examples: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-importer: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-msgs: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-tesla: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-tiago: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-turtlebot: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-tutorials: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-universal-robot: 1.0.6-1 → 1.1.0-1
- ros-foxy-webots-ros2-ur-e-description: 1.0.6-1 → 1.1.0-1
- ros-foxy-zstd-vendor: 0.3.7-1 → 0.3.8-1
Removed Packages [1]:
- ros-foxy-raptor-can-dbc-parser
Thanks to all ROS maintainers who make packages available to the ROS community. The above list of packages was made possible by the work of the following maintainers:
- Alejandro Hernandez
- Arne Nordmann
- Bence Magyar
- Blake Anderson
- Boston Cleek
- Chris Lalancette
- Claire Wang
- Cyberbotics
- Dave Coleman
- David Gossow
- Dirk Thomas
- Doron Hirshberg
- Evan Flynn
- Federico Nardi
- Felix Ruess
- Francisco Martin Rico
- Henning Kayser
- Isaac I. Y. Saito
- Jan Staschulat
- Jeremie Deray
- Jon Binney
- Julius Kammerl
- Karsten Knese
- Kotaro Yoshimoto
- Louise Poubel
- Mathieu Labbe
- Michael Carroll
- Michael Ferguson
- Michael Görner
- MoveIt Release Team
- New Eagle
- Sergey Dorodnicov
- Soft_illusion
- Stefan Laible
- Tully Foote
- Victor Lopez
- Victor López
- Vladimir Ermakov
- Youngjin Yun
- fmrico
- neweagle
- user


2 posts - 2 participants
ROS Discourse General: New packages for Melodic 2021-08-04
We’re happy to announce the next update of ROS Melodic. There are 45 new packages as well as 211 updated packages. Full details are below.
Package Updates for melodic
Added Packages [45]:
- ros-melodic-bev-mavros: 0.8.1-1
- ros-melodic-cartesian-control-msgs: 0.1.0-1
- ros-melodic-cartesian-interface: 0.1.3-1
- ros-melodic-cartesian-trajectory-controller: 0.1.3-1
- ros-melodic-cartesian-trajectory-interpolation: 0.1.3-1
- ros-melodic-copernicus-base: 1.1.0-1
- ros-melodic-copernicus-control: 1.1.0-1
- ros-melodic-copernicus-description: 1.1.0-1
- ros-melodic-copernicus-localization: 1.1.0-1
- ros-melodic-copernicus-msgs: 1.1.0-1
- ros-melodic-copernicus-navigation: 1.1.0-1
- ros-melodic-copernicus-rules: 1.1.0-1
- ros-melodic-copernicus-teleoperator: 1.1.0-1
- ros-melodic-er-public-msgs: 1.0.0-1
- ros-melodic-fuse: 0.4.2-1
- ros-melodic-fuse-constraints: 0.4.2-1
- ros-melodic-fuse-core: 0.4.2-1
- ros-melodic-fuse-doc: 0.4.2-1
- ros-melodic-fuse-graphs: 0.4.2-1
- ros-melodic-fuse-loss: 0.4.2-1
- ros-melodic-fuse-models: 0.4.2-1
- ros-melodic-fuse-msgs: 0.4.2-1
- ros-melodic-fuse-optimizers: 0.4.2-1
- ros-melodic-fuse-publishers: 0.4.2-1
- ros-melodic-fuse-variables: 0.4.2-1
- ros-melodic-fuse-viz: 0.4.2-1
- ros-melodic-gimbal: 0.8.1-1
- ros-melodic-google-cloud-texttospeech: 2.1.24-1
- ros-melodic-mavros-commands: 0.8.1-1
- ros-melodic-parameter-pa: 1.2.3-2
- ros-melodic-pass-through-controllers: 0.1.0-1
- ros-melodic-quanergy-client: 5.0.0-2
- ros-melodic-quanergy-client-ros: 4.0.0-1
- ros-melodic-rc-reason-clients: 0.2.1-1
- ros-melodic-rc-reason-msgs: 0.2.1-1
- ros-melodic-ros-controllers-cartesian: 0.1.3-1
- ros-melodic-rtcm-msgs: 1.0.0-1
- ros-melodic-scaled-controllers: 0.1.0-1
- ros-melodic-scaled-joint-trajectory-controller: 0.1.0-1
- ros-melodic-speed-scaling-interface: 0.1.0-1
- ros-melodic-speed-scaling-state-controller: 0.1.0-1
- ros-melodic-status-diagnostic: 0.8.1-1
- ros-melodic-steering-functions: 0.1.0-1
- ros-melodic-tf2-2d: 0.6.4-1
- ros-melodic-twist-controller: 0.1.3-1
Updated Packages [211]:
- ros-melodic-agni-tf-tools: 0.1.5-1 → 0.1.6-1
- ros-melodic-aruco-pose: 0.21.3-1 → 0.21.2-1
- ros-melodic-assimp-devel: 2.1.21-3 → 2.1.24-1
- ros-melodic-astuff-sensor-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-bayesian-belief-networks: 2.1.21-3 → 2.1.24-1
- ros-melodic-bcap-core: 3.1.2-1 → 3.2.0-1
- ros-melodic-bcap-service: 3.1.2-1 → 3.2.0-1
- ros-melodic-bcap-service-test: 3.1.2-1 → 3.2.0-1
- ros-melodic-bota-driver: 0.5.9-1 → 0.6.0-5
- ros-melodic-bota-node: 0.5.9-1 → 0.6.0-5
- ros-melodic-bota-signal-handler: 0.5.9-1 → 0.6.0-5
- ros-melodic-bota-worker: 0.5.9-1 → 0.6.0-5
- ros-melodic-clover: 0.21.3-1 → 0.21.2-1
- ros-melodic-clover-blocks: 0.21.3-1 → 0.21.2-1
- ros-melodic-clover-description: 0.21.3-1 → 0.21.2-1
- ros-melodic-clover-simulation: 0.21.3-1 → 0.21.2-1
- ros-melodic-collada-urdf-jsk-patch: 2.1.21-3 → 2.1.24-1
- ros-melodic-combined-robot-hw: 0.18.3-1 → 0.18.4-1
- ros-melodic-combined-robot-hw-tests: 0.18.3-1 → 0.18.4-1
- ros-melodic-controller-interface: 0.18.3-1 → 0.18.4-1
- ros-melodic-controller-manager: 0.18.3-1 → 0.18.4-1
- ros-melodic-controller-manager-msgs: 0.18.3-1 → 0.18.4-1
- ros-melodic-controller-manager-tests: 0.18.3-1 → 0.18.4-1
- ros-melodic-costmap-cspace: 0.10.10-1 → 0.10.11-1
- ros-melodic-delphi-esr-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-delphi-mrr-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-delphi-srr-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-denso-robot-bringup: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-control: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-core: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-core-test: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-descriptions: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-gazebo: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-moveit-config: 3.1.2-1 → 3.2.0-1
- ros-melodic-denso-robot-ros: 3.1.2-1 → 3.2.0-1
- ros-melodic-derived-object-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-dialogflow-task-executive: 2.1.21-3 → 2.1.24-1
- ros-melodic-dingo-control: 0.1.8-1 → 0.1.9-2
- ros-melodic-dingo-description: 0.1.8-1 → 0.1.9-2
- ros-melodic-dingo-msgs: 0.1.8-1 → 0.1.9-2
- ros-melodic-dingo-navigation: 0.1.8-1 → 0.1.9-2
- ros-melodic-downward: 2.1.21-3 → 2.1.24-1
- ros-melodic-exotica: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-aico-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-cartpole-dynamics-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-collision-scene-fcl-latest: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-core: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-core-task-maps: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-ddp-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-double-integrator-dynamics-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-dynamics-solvers: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-examples: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-ik-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-ilqg-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-ilqr-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-levenberg-marquardt-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-ompl-control-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-ompl-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-pendulum-dynamics-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-pinocchio-dynamics-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-python: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-quadrotor-dynamics-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-scipy-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-exotica-time-indexed-rrt-connect-solver: 6.1.1-1 → 6.2.0-1
- ros-melodic-ff: 2.1.21-3 → 2.1.24-1
- ros-melodic-ffha: 2.1.21-3 → 2.1.24-1
- ros-melodic-gdrive-ros: 2.1.21-3 → 2.1.24-1
- ros-melodic-graceful-controller: 0.3.1-1 → 0.4.0-1
- ros-melodic-graceful-controller-ros: 0.3.1-1 → 0.4.0-1
- ros-melodic-hardware-interface: 0.18.3-1 → 0.18.4-1
- ros-melodic-hector-gazebo: 0.5.1-0 → 0.5.4-1
- ros-melodic-hector-gazebo-plugins: 0.5.1-0 → 0.5.4-1
- ros-melodic-hector-gazebo-thermal-camera: 0.5.1-0 → 0.5.4-1
- ros-melodic-hector-gazebo-worlds: 0.5.1-0 → 0.5.4-1
- ros-melodic-hector-sensors-gazebo: 0.5.1-0 → 0.5.4-1
- ros-melodic-husky-base: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-bringup: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-control: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-description: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-desktop: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-gazebo: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-msgs: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-navigation: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-robot: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-simulator: 0.4.8-1 → 0.4.10-1
- ros-melodic-husky-viz: 0.4.8-1 → 0.4.10-1
- ros-melodic-ibeo-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-industrial-core: 0.7.1-1 → 0.7.3-1
- ros-melodic-industrial-deprecated: 0.7.1-1 → 0.7.3-1
- ros-melodic-industrial-msgs: 0.7.1-1 → 0.7.3-1
- ros-melodic-industrial-robot-client: 0.7.1-1 → 0.7.3-1
- ros-melodic-industrial-robot-simulator: 0.7.1-1 → 0.7.3-1
- ros-melodic-industrial-trajectory-filters: 0.7.1-1 → 0.7.3-1
- ros-melodic-industrial-utils: 0.7.1-1 → 0.7.3-1
- ros-melodic-jackal-control: 0.7.5-1 → 0.7.6-1
- ros-melodic-jackal-description: 0.7.5-1 → 0.7.6-1
- ros-melodic-jackal-msgs: 0.7.5-1 → 0.7.6-1
- ros-melodic-jackal-navigation: 0.7.5-1 → 0.7.6-1
- ros-melodic-jackal-tutorials: 0.7.5-1 → 0.7.6-1
- ros-melodic-joint-limits-interface: 0.18.3-1 → 0.18.4-1
- ros-melodic-joystick-interrupt: 0.10.10-1 → 0.10.11-1
- ros-melodic-jsk-3rdparty: 2.1.21-3 → 2.1.24-1
- ros-melodic-julius: 2.1.21-3 → 2.1.24-1
- ros-melodic-julius-ros: 2.1.21-3 → 2.1.24-1
- ros-melodic-kartech-linear-actuator-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-kvh-geo-fog-3d: 1.3.3-1 → 1.5.1-1
- ros-melodic-kvh-geo-fog-3d-driver: 1.3.3-1 → 1.5.1-1
- ros-melodic-kvh-geo-fog-3d-msgs: 1.3.3-1 → 1.5.1-1
- ros-melodic-kvh-geo-fog-3d-rviz: 1.3.3-1 → 1.5.1-1
- ros-melodic-laser-filters-jsk-patch: 2.1.21-3 → 2.1.24-1
- ros-melodic-leo: 1.2.1-1 → 1.2.2-1
- ros-melodic-leo-description: 1.2.1-1 → 1.2.2-1
- ros-melodic-leo-teleop: 1.2.1-1 → 1.2.2-1
- ros-melodic-libcmt: 2.1.21-3 → 2.1.24-1
- ros-melodic-librealsense2: 2.45.0-1 → 2.48.0-1
- ros-melodic-libsiftfast: 2.1.21-3 → 2.1.24-1
- ros-melodic-lpg-planner: 2.1.21-3 → 2.1.24-1
- ros-melodic-map-organizer: 0.10.10-1 → 0.10.11-1
- ros-melodic-mavlink: 2021.5.5-1 → 2021.7.7-1
- ros-melodic-mini-maxwell: 2.1.21-3 → 2.1.24-1
- ros-melodic-mir-actions: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-description: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-driver: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-dwb-critics: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-gazebo: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-msgs: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-navigation: 1.0.7-1 → 1.0.8-1
- ros-melodic-mir-robot: 1.0.7-1 → 1.0.8-1
- ros-melodic-mobileye-560-660-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-moveit-python: 0.4.1-1 → 0.4.2-1
- ros-melodic-neobotix-usboard-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-neonavigation: 0.10.10-1 → 0.10.11-1
- ros-melodic-neonavigation-common: 0.10.10-1 → 0.10.11-1
- ros-melodic-neonavigation-launch: 0.10.10-1 → 0.10.11-1
- ros-melodic-nlopt: 2.1.21-3 → 2.1.24-1
- ros-melodic-obj-to-pointcloud: 0.10.10-1 → 0.10.11-1
- ros-melodic-opt-camera: 2.1.21-3 → 2.1.24-1
- ros-melodic-pacmod-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-pgm-learner: 2.1.21-3 → 2.1.24-1
- ros-melodic-pilz-control: 0.5.21-1 → 0.5.23-1
- ros-melodic-pilz-extensions: 0.4.12-1 → 0.4.14-1
- ros-melodic-pilz-industrial-motion: 0.4.12-1 → 0.4.14-1
- ros-melodic-pilz-robot-programming: 0.4.12-1 → 0.4.14-1
- ros-melodic-pilz-robots: 0.5.21-1 → 0.5.23-1
- ros-melodic-pilz-status-indicator-rqt: 0.5.21-1 → 0.5.23-1
- ros-melodic-pilz-store-positions: 0.4.12-1 → 0.4.14-1
- ros-melodic-pilz-trajectory-generation: 0.4.12-1 → 0.4.14-1
- ros-melodic-pinocchio: 2.5.0-2 → 2.6.3-1
- ros-melodic-planner-cspace: 0.10.10-1 → 0.10.11-1
- ros-melodic-plotjuggler: 3.1.2-1 → 3.2.1-1
- ros-melodic-plotjuggler-ros: 1.2.0-1 → 1.5.0-1
- ros-melodic-prbt-gazebo: 0.5.21-1 → 0.5.23-1
- ros-melodic-prbt-hardware-support: 0.5.21-1 → 0.5.23-1
- ros-melodic-prbt-ikfast-manipulator-plugin: 0.5.21-1 → 0.5.23-1
- ros-melodic-prbt-moveit-config: 0.5.21-1 → 0.5.23-1
- ros-melodic-prbt-support: 0.5.21-1 → 0.5.23-1
- ros-melodic-psen-scan-v2: 0.2.1-1 → 0.3.1-1
- ros-melodic-python-qt-binding: 0.4.3-1 → 0.4.4-1
- ros-melodic-radar-msgs: 3.0.1-1 → 3.0.2-1
- ros-melodic-rc-genicam-driver: 0.5.0-1 → 0.5.2-1
- ros-melodic-rc-hand-eye-calibration-client: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-pick-client: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-roi-manager-gui: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-silhouettematch-client: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-tagdetect-client: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-visard: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-visard-description: 3.1.0-2 → 3.2.1-1
- ros-melodic-rc-visard-driver: 3.1.0-2 → 3.2.1-1
- ros-melodic-rcdiscover: 1.0.3-1 → 1.1.4-1
- ros-melodic-realsense2-camera: 2.3.0-1 → 2.3.1-1
- ros-melodic-realsense2-description: 2.3.0-1 → 2.3.1-1
- ros-melodic-respeaker-ros: 2.1.21-3 → 2.1.24-1
- ros-melodic-robot-body-filter: 1.1.9-1 → 1.2.0-2
- ros-melodic-robot-localization: 2.6.9-1 → 2.6.11-1
- ros-melodic-rokubimini: 0.5.9-1 → 0.6.0-5
- ros-melodic-rokubimini-bus-manager: 0.5.9-1 → 0.6.0-5
- ros-melodic-rokubimini-description: 0.5.9-1 → 0.6.0-5
- ros-melodic-rokubimini-ethercat: 0.5.9-1 → 0.6.0-5
- ros-melodic-rokubimini-msgs: 0.5.9-1 → 0.6.0-5
- ros-melodic-rokubimini-serial: 0.5.9-1 → 0.6.0-5
- ros-melodic-ros-control: 0.18.3-1 → 0.18.4-1
- ros-melodic-ros-speech-recognition: 2.1.21-3 → 2.1.24-1
- ros-melodic-rospatlite: 2.1.21-3 → 2.1.24-1
- ros-melodic-rosping: 2.1.21-3 → 2.1.24-1
- ros-melodic-rostwitter: 2.1.21-3 → 2.1.24-1
- ros-melodic-roswww-static: 0.21.3-1 → 0.21.2-1
- ros-melodic-rqt-controller-manager: 0.18.3-1 → 0.18.4-1
- ros-melodic-rqt-rviz: 0.6.0-0 → 0.7.0-1
- ros-melodic-rviz: 1.13.17-1 → 1.13.18-1
- ros-melodic-safety-limiter: 0.10.10-1 → 0.10.11-1
- ros-melodic-sdc21x0: 1.0.7-1 → 1.0.8-1
- ros-melodic-sesame-ros: 2.1.21-3 → 2.1.24-1
- ros-melodic-simple-message: 0.7.1-1 → 0.7.3-1
- ros-melodic-slic: 2.1.21-3 → 2.1.24-1
- ros-melodic-track-odometry: 0.10.10-1 → 0.10.11-1
- ros-melodic-trajectory-tracker: 0.10.10-1 → 0.10.11-1
- ros-melodic-transmission-interface: 0.18.3-1 → 0.18.4-1
- ros-melodic-turtlebot3-fake: 1.3.1-1 → 1.3.2-1
- ros-melodic-turtlebot3-gazebo: 1.3.1-1 → 1.3.2-1
- ros-melodic-turtlebot3-simulations: 1.3.1-1 → 1.3.2-1
- ros-melodic-udp-com: 1.1.1-1 → 1.1.2-1
- ros-melodic-ur-client-library: 0.2.2-1 → 0.3.1-1
- ros-melodic-urg-stamped: 0.0.11-1 → 0.0.12-2
- ros-melodic-view-controller-msgs: 0.1.3-0 → 0.2.0-1
- ros-melodic-voice-text: 2.1.21-3 → 2.1.24-1
- ros-melodic-warthog-control: 0.1.3-1 → 0.1.4-2
- ros-melodic-warthog-description: 0.1.3-1 → 0.1.4-2
- ros-melodic-warthog-msgs: 0.1.3-1 → 0.1.4-2
- ros-melodic-webots-ros: 4.0.1-1 → 4.1.0-1
- ros-melodic-xacro: 1.13.11-1 → 1.13.12-1
- ros-melodic-ypspur-ros: 0.3.4-1 → 0.3.5-1
Removed Packages [0]:
- ros-melodic-bota-device-driver
- ros-melodic-bota-device-driver-dbgsym
- ros-melodic-rokubimini-examples
- ros-melodic-rokubimini-examples-dbgsym
- ros-melodic-rokubimini-factory
- ros-melodic-rokubimini-factory-dbgsym
- ros-melodic-rokubimini-manager
- ros-melodic-rokubimini-manager-dbgsym
- ros-melodic-ros-speech-recognition-dbgsym
Thanks to all ROS maintainers who make packages available to the ROS community. The above list of packages was made possible by the work of the following maintainers:
- Alexander Gutenkunst
- Alexey Rogachevskiy
- Atsushi Watanabe
- AutonomouStuff Software Development Team
- AutonomouStuff Software Team
- Bence Magyar
- Bota Systems AG
- Christian Rauch
- Claire Wang
- Cyberbotics
- DENSO WAVE INCORPORATED
- Davide Faconti
- Doron Hirshberg
- Enrique Fernandez
- Evan Flynn
- Felix Exner
- Felix Ruess
- Fictionlab
- Fábio Azevedo
- G.A. vd. Hoorn (TU Delft Robotics Institute)
- Hitoshi Kamada
- Holger Banzhaf
- Joachim Schleicher
- Justin Carpentier
- Kei Okada
- Marek Materzok
- Martin Günther
- Martin Pecka
- Michael Ferguson
- Mike Purvis
- Monika Florek-Jasinska
- MoveIt Setup Assistant
- Noda Shintaro
- Oleg Kalachev
- Peter Weissig
- Robert Haschke
- Ross Taylor
- Ryohei Ueda
- Sachin Devadiga
- Sergey Dorodnicov
- Shingo Kitagawa
- Stefan Fabian
- Stefan Scherzinger
- Stephen Williams
- Takuya Nakaoka
- Tom Moore
- Tony Baltovski
- Traiko Dinev
- Trevor Bostic
- Vladimir Ermakov
- Vladimir Ivan
- Will Son
- William Woodall
- Wolfgang Merkt
- Yohei Kakiuchi
- Yuki Furuta
- Yuto Inagaki
- Zach LaCelle
- aferreira
- jmcarvalho
- k-okada
- niels
2 posts - 2 participants
ROS Discourse General: HAROS v4 and IROS 2021 Tutorial
Hello, everyone!
HAROS is a set of tools for quality assurance of ROS systems. It reads your ROS source code and detects a number of issues. It is also capable of automatically extracting the Computation Graph from the source code (with some limitations), and verify properties (with some limitations) by generating runtime monitors or tests, for instance.
HAROS currently sits at version 3.10.3, which is likely one of the last versions supporting only ROS1. We are organizing a tutorial at IROS 2021, in late september, targeting this version.
Details on this tutorial can be found on this page.
On another note, I am starting the design and development of the next major version, v4, which, among other things, aims at:
- supporting ROS2, in addition to ROS;
- improving source code parsing capabilities;
- redesigning the visualizer, offering new ways of exploring reports and models;
- making the tool more user-friendly, overall.
Since this is a free and open source tool, I have no clue who its users are and how to reach them effectively. So, I take this opportunity to share a small survey on Google Forms, aiming to collect user feedback and help me decide on how to better invest my time, in ways that are actually useful for the ROS community.
I know people generally do not like surveys, but, in my defense, there’s only a handful of required questions, so it can be done in about two minutes of your time. It is also anonymous, I am not requiring emails or sign-ins of any kind.
Let me know if you are interested in any of these topics!
Cheers
7 posts - 3 participants
ROS Industrial: ROS2-Industrial training material has been open-sourced
ROS-Industrial recently open-sourced its ROS2 training material, created with ROSIN (https://www.rosin-project.eu/) funding. Here is the link for the repository: https://github.com/ros-industrial/ros2_i_training. This work is licensed under a Creative Commons Attribution 4.0 International License 11 (https://creativecommons.org/licenses/by/4.0/legalcode).
The contents include slides and workshops for the following topics:
- ROS2 basics:
- Composed node, publish / subscribe, services, actions, parameters, launch system
- Manged nodes, Quality of Service (QoS)
- File system
- SLAM and Navigation
- Manipulation basics
More information about this update can be found on ROS Discourse post: https://discourse.ros.org/t/open-sourcing-our-ros2-industrial-training-material/21179
Get in touch with us if you would like to improve the existing content or would like to contribute new contents.
Thanks to ROSIN to make this happen!
ROS Discourse General: Interview with Steve Crowe of The Robot Report
We had the pleasure of sitting down with Steve Crowe, editorial director of The Robot Report, to talk about industry trends and his favorite robotics projects out in the wild.
It was particularly awesome that he shouted out Open Robotics’ development of a fleet management system in partnership with Singapore’s Centre for Healthcare Assistive and Robotics Technology. He sees the industry’s efforts to set standardized communication protocols for heterogeneous robotic fleets as a vital phase of the industry’s maturation.

Check out the full interview here: Spotlight: Steve Crowe, Editorial Director of The Robot Report - Foxglove Studio
1 post - 1 participant
ROS Discourse General: Announcing ODrive driver for ros2_control
Hi,
we have implemented ODrive hardware interface for ros2_control.
ODrive is a high performance open source FOC driver for BLDC, which supports position, velocity and torque control. Now all these interfaces are exported to ros2_control 
https://github.com/Factor-Robotics/odrive_ros2_control
5 posts - 3 participants
ROS Discourse General: ROS News for the Week of 7/26/2021
ROS News for the Week of July 26th, 2021.

Meet Pupper, the absolutely adorable miniature, legged, ROS robot – Source Code

The Indy Autonomous Challenge vehicle completed its first autonomous driving lap.
Events
- 7/31/2021 Reddit Robot Showcase with Keynote by Open Robotics CEO
- 8/7/2021 - 8/13/2021 ROS Summer School in China
- 8/10/2021 MD&M Conference Panel: Interoperability to Increase Robot Adoption
- 8/18/2021 ROS Industrial AP Workshop
- 9/21/2021 DARPA SubT Final
- 9/14/2021 PX4 Dev Summit
- 9/16/2021 ROSConJp
- 10/5/2021 ROS 2 with Elixir
- 10/16/2021 Self Racing Cars Bay Area
- 10/21/2021 ROSCon is Back!
News
- Blue Ocean, Fetch on The Robot Report
- TRI 2021 CVPR Keynote
- Indy Autonomous Challenge First Lap
- 3D Printing Cyclodial Drives
- Mark Rober’s Record Breaking Domino Robot
- New Robotics Accelerator in Boston
- Side By Side Comparison of ZED Depth Cameras
- DepthAI Pose Module
- Animal Pose Detection
- Olympic Basketball Robot
- Polimove Wins Indy Autonomous Challenge Simulation Race
- Weekly Robots 153
- Blender Pipeline for Photorealistic Dataset Generation
- New OpenCV AI Jobs Board
- Beach Litter Robot
- Robot Brains Podcast – AMP Robotics
- Agility Robotics Runs a 5k
- F1Tenth IROS Grand Prix Registration
- Autonomy Fail
- Marketplace Podcast on Space Robots
ROS
- Apex.Autonomy 1.4 Release
- JetMax Mini ROS Robot ARM Kickstarter
- Mobile Autonomous Coating Application For Aircraft Sustainment
- Cute little legged ROS robot – Source Code
- July Ignition Community Meeting Video
- TurtleBot 3, Unity, and ROS2 (Japanese)
- New Elephant Robotics AGV + Arm – Runs ROS
- ROS 2 Foxy Drivers for Doosan Robots
- AWS Robomaker WorldForge - now with more doors
- Introduction to MoveIt Servo
- Integration Service now supports QoS
- GAAS – VTOL and Drone Autonomy Controller Based on ROS
- 52 New and 44 Updated Packages for ROS Noetic
- Clearpath Jackal Robot Supports Noetic
- Automatic Multilayer Welding from Fraunhofer
- ROS 1 Vs. ROS 2 – Overview for Developers
- Webots R2021b Released
- Swerve Steering Discussion
- TALK: ROS 2 + Zero Copy
Questions
- How can I specify the log level for all nodes when running a launch file?
- ROS 2 services using composition.
- How to use micro-ROS on OpenCR
1 post - 1 participant
ROS Discourse General: Webots R2021b released!

We are happy to announce this new release of our open-source robot simulator with many improvements including new models, better support of AI/ML applications, and a new Web Rendering Engine. See the full list of new features at:
https://cyberbotics.com/doc/blog/Webots-2021-b-release
ROS 1: This release brings a ros_control integration (please use the tarball package) and a Tiago simulation example (demonstrates ros_control, gmapping, and MoveIt integration).
ROS 2: We also released a new version of the webots_ros2 package (v1.1.0, waiting for the Foxy sync) which brings a few new packages:
- webots_ros2_driver: A new Webots ROS 2 interface core designed for performance, extensibility with C++ plugins, and an easy configuration through URDF files.
- webots_ros2_control: A webots_ros2 plugin that integrates the ros2_control framework. The plugin is featured in the webots_ros2_turtlebot package.
- webots_ros2_tesla: The package demonstrates a simulation of automobiles with Webots and ROS 2. The Tesla Model 3 vehicle follows lanes using a simple OpenCV image processing.
- webots_ros2_mavic: The package demonstrates a simulation of drones with Webots and ROS 2. The DJI’ Mavic 2 PRO drone uses a simple PD controller to follow the given geometry_msgs/Twist commands.
Web: The new Web Rendering Engine is ported from C++ to WebAssembly to ensure the same rendering as in the Webots desktop application. We also wrote an article in which we shared more technical details, some tips and results:
https://medium.com/cyberbotics/porting-a-c-rendering-engine-to-webassembly-9c32d76c31f1
Get the new release from:
https://github.com/cyberbotics/webots/releases/tag/R2021b
4 posts - 3 participants
ROS Discourse General: New Packages for Noetic 2021-07-26
We’re happy to announce 52 and 44 updates are now available in ROS Noetic. This sync was tagged as noetic/2021-07-26.
Thank you to every maintainer and contributor who made these updates available!
Package Updates for ROS Noetic
Added Packages [52]:
- ros-noetic-dynamixel-workbench-msgs: 2.0.2-2
- ros-noetic-fuse: 0.4.2-1
- ros-noetic-fuse-constraints: 0.4.2-1
- ros-noetic-fuse-core: 0.4.2-1
- ros-noetic-fuse-doc: 0.4.2-1
- ros-noetic-fuse-graphs: 0.4.2-1
- ros-noetic-fuse-loss: 0.4.2-1
- ros-noetic-fuse-models: 0.4.2-1
- ros-noetic-fuse-msgs: 0.4.2-1
- ros-noetic-fuse-optimizers: 0.4.2-1
- ros-noetic-fuse-publishers: 0.4.2-1
- ros-noetic-fuse-variables: 0.4.2-1
- ros-noetic-fuse-viz: 0.4.2-1
- ros-noetic-gmcl: 1.0.1-3
- ros-noetic-imu-from-ios-sensorlog: 0.0.1-1
- ros-noetic-industrial-core: 0.7.2-1
- ros-noetic-industrial-deprecated: 0.7.2-1
- ros-noetic-industrial-robot-client: 0.7.2-1
- ros-noetic-industrial-robot-simulator: 0.7.2-1
- ros-noetic-industrial-trajectory-filters: 0.7.2-1
- ros-noetic-industrial-utils: 0.7.2-1
- ros-noetic-inorbit-republisher: 0.2.1-1
- ros-noetic-joint-qualification-controllers: 1.0.15-1
- ros-noetic-kvh-geo-fog-3d: 1.5.1-1
- ros-noetic-kvh-geo-fog-3d-driver: 1.5.1-1
- ros-noetic-kvh-geo-fog-3d-msgs: 1.5.1-1
- ros-noetic-kvh-geo-fog-3d-rviz: 1.5.1-1
- ros-noetic-open-manipulator-gazebo: 1.1.1-1
- ros-noetic-open-manipulator-msgs: 1.0.1-1
- ros-noetic-open-manipulator-p-gazebo: 1.0.1-1
- ros-noetic-open-manipulator-p-simulations: 1.0.1-1
- ros-noetic-open-manipulator-simulations: 1.1.1-1
- ros-noetic-pr2-bringup-tests: 1.0.15-1
- ros-noetic-pr2-counterbalance-check: 1.0.15-1
- ros-noetic-pr2-motor-diagnostic-tool: 1.0.15-1
- ros-noetic-pr2-self-test: 1.0.15-1
- ros-noetic-pr2-self-test-msgs: 1.0.15-1
- ros-noetic-quanergy-client: 5.0.0-1
- ros-noetic-quanergy-client-ros: 4.0.0-1
- ros-noetic-robotis-manipulator: 1.1.1-2
- ros-noetic-simple-message: 0.7.2-1
- ros-noetic-steering-functions: 0.1.0-1
- ros-noetic-tf2-2d: 0.6.4-1
- ros-noetic-thunder-line-follower-pmr3100: 0.1.1-1
- ros-noetic-volta-base: 1.2.0-1
- ros-noetic-volta-control: 1.2.0-1
- ros-noetic-volta-description: 1.2.0-1
- ros-noetic-volta-localization: 1.2.0-1
- ros-noetic-volta-msgs: 1.2.0-1
- ros-noetic-volta-navigation: 1.2.0-1
- ros-noetic-volta-rules: 1.2.0-1
- ros-noetic-volta-teleoperator: 1.2.0-1
Updated Packages [44]:
- ros-noetic-agni-tf-tools: 0.1.5-1 → 0.1.6-1
- ros-noetic-bota-driver: 0.6.0-2 → 0.6.0-3
- ros-noetic-bota-node: 0.6.0-2 → 0.6.0-3
- ros-noetic-bota-signal-handler: 0.6.0-2 → 0.6.0-3
- ros-noetic-bota-worker: 0.6.0-2 → 0.6.0-3
- ros-noetic-cv-camera: 0.5.0-3 → 0.6.0-1
- ros-noetic-industrial-msgs: 0.7.1-1 → 0.7.2-1
- ros-noetic-librealsense2: 2.45.0-1 → 2.48.0-1
- ros-noetic-mavlink: 2021.6.6-1 → 2021.7.7-1
- ros-noetic-moveit-python: 0.4.1-1 → 0.4.2-1
- ros-noetic-psen-scan-v2: 0.2.1-1 → 0.3.1-1
- ros-noetic-python-qt-binding: 0.4.3-1 → 0.4.4-1
- ros-noetic-rcdiscover: 1.1.2-1 → 1.1.4-1
- ros-noetic-realsense2-camera: 2.3.0-1 → 2.3.1-1
- ros-noetic-realsense2-description: 2.3.0-1 → 2.3.1-1
- ros-noetic-rokubimini: 0.6.0-2 → 0.6.0-3
- ros-noetic-rokubimini-bus-manager: 0.6.0-2 → 0.6.0-3
- ros-noetic-rokubimini-description: 0.6.0-2 → 0.6.0-3
- ros-noetic-rokubimini-ethercat: 0.6.0-2 → 0.6.0-3
- ros-noetic-rokubimini-msgs: 0.6.0-2 → 0.6.0-3
- ros-noetic-rokubimini-serial: 0.6.0-2 → 0.6.0-3
- ros-noetic-ros-ign: 0.111.0-1 → 0.111.1-2
- ros-noetic-ros-ign-bridge: 0.111.0-1 → 0.111.1-2
- ros-noetic-ros-ign-gazebo: 0.111.0-1 → 0.111.1-2
- ros-noetic-ros-ign-gazebo-demos: 0.111.0-1 → 0.111.1-2
- ros-noetic-ros-ign-image: 0.111.0-1 → 0.111.1-2
- ros-noetic-ros-industrial-cmake-boilerplate: 0.2.9-2 → 0.2.11-1
- ros-noetic-tesseract-collision: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-common: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-environment: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-geometry: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-kinematics: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-scene-graph: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-srdf: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-support: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-urdf: 0.4.1-1 → 0.5.0-1
- ros-noetic-tesseract-visualization: 0.4.1-1 → 0.5.0-1
- ros-noetic-turtlebot3-fake: 1.3.1-1 → 1.3.2-2
- ros-noetic-turtlebot3-gazebo: 1.3.1-1 → 1.3.2-2
- ros-noetic-turtlebot3-simulations: 1.3.1-1 → 1.3.2-2
- ros-noetic-udp-com: 1.1.1-1 → 1.1.2-1
- ros-noetic-urg-stamped: 0.0.11-1 → 0.0.12-1
- ros-noetic-webots-ros: 4.0.1-1 → 4.1.0-1
- ros-noetic-xacro: 1.14.7-1 → 1.14.8-1
Removed Packages [0]:
Thanks to all ROS maintainers who make packages available to the ROS community. The above list of packages was made possible by the work of the following maintainers:
- Alexander Gutenkunst
- Atsushi Watanabe
- Bota Systems AG
- Carlos Agüero
- Claire Wang
- Cyberbotics
- David Feil-Seifer
- Doron Hirshberg
- Enrique Fernandez
- Evan Flynn
- Felix Ruess
- G.A. vd. Hoorn (TU Delft Robotics Institute)
- Holger Banzhaf
- InOrbit
- Levi Armstrong
- Louise Poubel
- Mhd Ali Alshikh Khalil
- Michael Ferguson
- Nikhil Venkatesh
- Robert Haschke
- Ross Taylor
- Sergey Dorodnicov
- Stephen Williams
- Takashi Ogura
- ThundeRatz
- Tom Moore
- Trevor Bostic
- Vladimir Ermakov
- Will Son
- Zach LaCelle
- usad2
1 post - 1 participant
ROS Discourse General: Independent (Swerve) steering controller for ros_control
Hello everyone,
This topic is a question about a contribution to ros_control.
I was working on a reconfigurable mobile robot project before and needed to have an N-wheel steering controller. Four_wheel_steering controller wasn’t very useful in this case. So, I made a package that can take any number of wheels with different configurations (position relative to the robot base frame, steering angle limitation, wheel radius) and calculate the required steering angle and angular velocity for this wheel. It takes into consideration the steering limitation and the closest path to the target (whether to get to the target angle or to its supplementary and negate wheel velocity). The configuration can be set through a YAML file and/or from the tf tree (for the wheels’ position).
I have also worked on an odometry node. It still has some singularity issues and still need some work. I came across some papers (like Instantaneous centre of rotation estimation of an omnidirectional mobile robot) and would like to see how they can help.
There is a YouTube video showing a demo:
 Steering ROS Package Demo")
The question is: Would this work, after all needed preparations, modifications, and tests, add a value to ros_control as a contribution?
I hope one of the ros_control contributors/maintainers family can answer. And Thank you for your time.
22 posts - 8 participants
ROS Discourse General: Robot cybersecurity, a review
Hi,
For those of you caring about security in ROS and in robotics in general, the following article might be of interest: robot cybersecurity, a review.
Shortly, the article attempts to answer two questions: what’s the status of cybersecurity in robotics? and, how can we best improve cyber-resillience in robotics? For that, the status of the robot cybersecurity field is reviewed considering three sources of data: 1) recent literature, 2) questionnaires performed in top robotics forums (this includes data collected in the community through past events and surveys) and 3) recent research results in offensive robot cybersecurity.
The article makes a number of observations based on the data available (thanks to all of those who participated in the data collection  ). Here’re are some of the ROS-related ones:
). Here’re are some of the ROS-related ones:
There’s a gap between the expectations and the actual investment, which suggests that cybersecurity actions in robotics will grow in the future for the ROS community.
The lack of robot-specific security measures (36%) and offensive assessments (26%) can be interpreted as an indicator of the maturity level of the technology when compared to other sectors (e.g. IT or OT) where these practices are common and specialized.
For both ROS and ROS-I groups, (security) mitigations concentrate mostly on the perimeter.
For more, check out other robot cybersecurity research results.
The version shared is a postprint-produced PDF of an article submitted to the International Journal of Cyber Forensics and Advanced Threat Investigations (CFATI). Some rights reserved. The definitive publisher-authenticated version will be available online from Concept Tech Publishing Int Journals
1 post - 1 participant
ROS Discourse General: ROS News for the Week of 7/19/2021
ROS News for the Week of July 19th, 2021.

AWESOME Corvus One Drone Demo – it uses ROS

Must Read Paper: A Comparison of SLAM Techniques

Hello Robot Simulation for Noetic / Melodic

Your ROS Weekly update turned 1 today!
Events
- ROSCon Registration is Open
- 7/25/2021 Black in Robotics Build a ROS 2 Robot
- 7/28/2021 Ignition Community Meeting – Topic Ignition vs. Gazebo
- 7/31/2021 Reddit Robot Showcase with Keynote from Open Robotics
- 8/10/2021 MD&M Conference Panel: Interoperability to Increase Robot Adoption
- 8/18/2021 ROS Industrial AP Workshop
- 9/21/2021 DARPA SubT Final
- 9/14/2021 PX4 Dev Summit
- 9/16/2021 ROSConJp
- 10/16/2021 Self Racing Cars Bay Area
- 10/21/2021 ROSCon is Back!
News
- Installing Windows VM in a Linux Docker Container
- JetMax Robot Kickstarter
- Foxglove on the Orange Website
- New Microsoft Linux
- FTC Right to Repair Passes
- Open Source Mocap
- Drug Drones
- AWESOME Corvus One Drone Demo
- Path Robotics Raises $100M after Raising $56M
- ABB Aquires ASTI Mobile
- Robots Collide, Cause Fire at UK Grocer
- Google AI: Speeding up RL with a new Physics Engine
- OpenAI Disbands Robotics Research Team
- Google X Introduces “Intrinsic” – Wants to Ease the Development of Industrial Robots
- Mission Robotics Profile on Robotics 24/7
- Enabling Real-World Object Manipulation with Sim-to-Real Transfer
- Time-Optimal Planning for Quadrotor Waypoint Flight – check out the video
- 2021 NIST ARIAC Results
- Sniffy Bugs: Gas Seeking Nano Quadcopters
- 12 Robotics Teams Will Hunt For (Virtual) Subterranean Artifacts
- AI and Robots Are a Minefield of Cognitive Biases
- OpenCV 4.5.3 and 3.4.15 Released
ROS
- VRX 1.4 Released
- 158 new and 71 Updated Packages in Galactic Geochelone
- 63 New and 56 Updated Packages for ROS 2 Rolling Ridley
- Roomba ROS Robot Build Log (Japanese)
- Enabling Real-World Object Manipulation with Sim-to-Real Transfer
- IMUs with Legged Robot (Japanese)
- Paper: ROS for HRI
- ROS HUD Hack
- YOLO X ROS Package
- A Review of Physics Simulators for Robotic Applications
- Connecting Remote ROS 2 Nodes using Docker & VPN
- Corvus One - ROS-based L4 Autonomy for indoor drones
- [Nav2] A Comparison of Modern General-Purpose Visual SLAM Approaches
- MoveIt with Docker
- Hello Robot Stretch Gazebo Simulation for Melodic and Noetic
- ROS2 Easy-to-Adopt Perception and Manipulation Modules Open Sourced
- GMCL vs AMCL for Localization
- Handling messages memory Tutorial for micro-ROS
Questions
- Best practices for real-time capabilites in ROS 2
- Navigation Tuning Question
- How to properly import 2D map from Google map to Navigation Stack?
2 posts - 2 participants
ROS Discourse General: Open source libraries for robotics development
Hello,
In the course of building Foxglove Studio, we’ve published several open source npm packages to facilitate common ROS development tasks – like serializing and deserializing data, parsing message definitions, and exposing helper methods for data manipulation.
Full details here: Open source software - Docs - Foxglove Studio

While we originally developed these for Studio, they can be included in any TypeScript or JavaScript project.
Feel free to reach out to us on GitHub or Slack if you have any questions!
1 post - 1 participant
ROS Discourse General: VRX Simulation Platform 1.4 and the VRX Competition 2022
VRX Simulation Platform Release 1.4 and VRX Competition 2022
We recently announced the release of version 1.4 of the VRX simulation platform in the Maritime Robotics section. We’d like to highlight a few notes that may be of interest to the general community:
- The VRX simulation platform is a virtual environment built in Gazebo, designed for accelerating development of unmanned surface vehicles.
- VRX also serves as the “venue” for the VRX 2022 Competition, a virtual competition closely coordinated with RobotX 2022.
- VRX 2022 is open to any student team affiliated with an educational institution.
- Your questions or comments are very welcome.
For further details, please see the full post under Maritime Robotics.
Sincerely,
The VRX Technical Team: Brian, Carlos, Carson and Michael
3 posts - 3 participants
ROS Discourse General: ROS 2 TSC Meeting Minutes: 2021-07-15
ROS 2 TSC Meeting Minutes 2021-07-15
ROS 2 TSC Contribution Report - 2021-07-15.pdf (168.4 KB)
-
Attendees
- Microsoft - Lou Amadio
- Bosch - Karsten Knese
- Open Robotics - Chris Lalancette, Kat Scott, Geoff Biggs, Brian Gerkey, Louise Poubel, Tully Foote, William Woodall
- Samsung Research - Steve Macenski
- Rover Robotics - Nick Fragale, Davis Fay
- ROBOTIS - Will Son
- eProsima - Jaime Martin Losa
- PickNik - Dave Coleman, David Lu!!
- ADLINK - Joe Speed
- Intel - Harold Yang
- Amazon - Aaron Blasdel, Emerson Knapp
- Toyota Research Institute - Ian McMahon
- SwRI (representing GVSC) - Jerry Towler
- LG Electronics - Brian Shin
- Apex.AI - Lyle Johnson
- Sony - Tomoya Fujita
- iRobot - Ori Taka
- iRobot - Alberto Soragna
-
Preliminaries [5 mins]
- [Kat][1 min] Please remember to fill out your contribution report at the bottom of this document prior to the meeting.
- Feel free to help with notes.
- [Kat][1 min]
- Brian will be handing off Chairing the meeting to Kat
-
Old business [10 mins]
- [Kat][1 min] – Webtools WG Passes
- Follow up: Emerson to submit a PR to add this WG to the ros2 docs
- [Kat][2 mins] – Community representatives implementation update
- ROS 2 Technical Steering Committee Charter — ROS 2 Documentation: Galactic documentation
- Rough plan for comment is here.
- Kat will lead the effort, stay tuned to ROS Discourse / e-mail.
- [Joe][2 Min] – New Applicant Evaluations intake process
- [Jaime][5 mins] – Update on FTE enforcement in charter amendment vote
- Add 1 FTE enforcement policy by JaimeMartin · Pull Request #1685 · ros2/ros2_documentation · GitHub
- Vote will go out after TSC Meeting
- NOTE: Only evaluate REP-2005 for contribution
- Steve M: Who decides the roadmap? Jaime – Roadmap is flexible and can be extended. Chris L: Should we expand the roadmap like that?
- Kat – this has immediate ramifications.
- Steve M: REP-2005 makes it hard to add new things that don’t exist. Adding to REP 2005 is difficult. This may make strict enforcement be detrimental rather than philosophical enforcement.
- Steve M: Due to the scope may remove much of the TSC.
- [Kat][1 min] – Webtools WG Passes
-
New business [35 mins]
-
Dave Coleman[15 Min] – Reflections after 1 year on TSC: how can we tackle more substantive issues with ROS 2?
- TSC was a good move, ROS 2 is good.
- TSC discussion is different from PickNik users.
- Time spent for governance is too much.
- Too many inconsequential updates (competitions, features, company specific, university teams)
- Are there enough ROS 2 drivers? – also param servers, launch files, RVIZ, merge delays.
- how do we focus on core software development? Make it possible to bring things up and find solutions w/o the standard response to suggest the person raising the issues fix it themselves.
- ROS as a product, working on community health, leveraging the community, are all good alternatives
- ChrisL – Roadmap for G was hard ⇒ Roadmap for H is going to be bottom up.
- JoeSpeed – discussion of doing one executor well versus lots of diff executors as example
- Dave – should be able to do core merge. Easier access to core ROS repos.
- Chris L: Reviewers / maintainers are the bottle necks. We have added a few, but we need more core maintainers & reviewers.
- Brian – we tried to recruit maintainers a few years ago, it didn’t go well.
- Kat – Could we consider reviews and maintain/contribute count to TSC?
- Aaron – Who is the customer of ROS 2 and what do they need/want?
- Karsten documentation and DDS config is still not there yet. What is the product of ROS 2?
- Discourse discussion
- Nick Fragale [5 Min] – Talk about our new product, the Rover Mini, launching on kickstarter and Sept 1st, $449 super early bird special. Shipping with ROS 2 by default.
- Would like to drive adoption to ROS 2.
- Driving adoption does not count towards tsc contribution.
- New robot drops in 15 days.
- We plan to use this robot to teach ROS 2 and drive adoption.
- Would like feedback for the community
- Compute is Jetson Nano 4Gb – maybe Oak-D
-
Lou Amadio[10 Min] – Demo The Visual Studio Code ROS extension’s ROS2 specific features, including launch debugging, and ROS2 health monitoring.
Asks from the TSC:- Feature Requests
- Feedback on bugs
- Discuss Roadmap
-
Dave Coleman[15 Min] – Reflections after 1 year on TSC: how can we tackle more substantive issues with ROS 2?
-
Recurring business
- [clalancette] Next ROS 2 distro release
- New core maintainers
- Humble roadmap
- Open Robotics theme is “Developer Experience”
- Preliminary roadmap is next weekish.
- Concerns / requests should be e-mailed to Chris L.
- Humble timeline
- Timeline is similar to Galactic
- Requests need to be within the next few weeks
- RMW Freeze moves up two weeks earlier
- Freeze ROS Base vs ROS Core (ROSBase is a superset of core)
- Default RMW selection
- It is that time of the year.
- Vote: first week of November.
- October TSC Meeting Topic
- Data done by early October.
- Chris will send a doc with a more complete outline.
- Miscellaneous pedantry around provider / contributor and RMW and DDS.
- What’s in the report
- Chris will create a “template” and providers will provide information about this.
- TSC members should make their suggestions ASAP.
- “RMW Providers” will also give their thoughts.
- Lou: can we have different RMW for diff OSs – Chris: Would prefer that this is not the case.
- [clalancette] Next ROS 2 distro release
-
Working groups [<=5 mins each]
-
[Knese] Control
- More development towards robot demo
- Joint limits implementation / revisiting existing ROS1 joint limits implementation
- Non-trivial (non double) state and command interfaces, e.g. export CV_MAT pointer or complex data type in hardware implementation
- More development towards robot demo
-
[Speed] Edge AI
- No meeting, focused on supporting Indy Autonomous Challenge university teams racing ROS 2
No driver? No problem—this is the Indy Autonomous Challenge | Ars Technica
- No meeting, focused on supporting Indy Autonomous Challenge university teams racing ROS 2
-
[Martin Losa] Embedded
- Hardware in-the-loop testing for micro-ROS
- Presentation by Bartolome Jimenez Vera from CAPRA Robotics about a high level prototype that uses micro-ROS
- Full Live Demo using micro-ROS with the ESP32board
-
[Coleman] Manipulation
- MoveIt 2.2 released!
- A full sync with MoveIt 1 (#505)
- Use MoveItCpp as MoveGroup context, multi planning pipeline support (moveit#2127)
- Enabled Bullet collision detection (#473)
- Galactic and Rolling Support, enable CI (#494)
- Lots of improvements to ros2_control to enable MoveIt integration with hardware
- Feature comparison table released between MoveIt 1 and 2
- MoveIt 2.2 released!
-
[Woodall] Middleware
- Few meetings since the last TSC meeting.
- Bumped progress on pull requests for:
- rmw callback APIs (event executor related)
- content filtered topics
- WaitForAcknowledgements rmw API
- fyi Alberto & Erik met today re progressing the multithreaded executor support in rmw_cyclonedds. Seems should be able to get to a fix soon (for unblocking RMW listener APIs)
-
[Macenski] Navigation
- Still patching up tests that broke from the galactic release
- New python commander library with POC examples provided
- CI system updated to use Rolling rather than master builds, developer guides and workflows to be updated accordingly
- Steve is mentoring 3 students this summer
- Zhenpeng: working on reducing the number of nodes in Nav2 and instead replacing with best use of multithreaded executors and callback groups
- Saurabh: working on some basic safety features for nav2 commonly developed by OEMs
- Anushree: working on assisted teleop capabilities
- Regulated Pure Pursuit controller now can handle faster velocities and support reversing
- Galactic synced to receive Hybrid-A* optimizations that were completed last month
-
[Johnson] Real-time
- Preparing for the real-time workshop at ROS conference
- Had a meeting last week between Apex.AI, Bosch and Win River, review the agenda and discuss a HW selection
- Next call planned for the next week
- fyi ADLINK IT is setting up network for hosting RT WG remotely accessible systems. Sorry so slow.
- Preparing for the real-time workshop at ROS conference
-
[Biggs] Rust
- A complaint has been made about the Rust WG representation on the TSC.
- ROS 2 TSC Meeting Minutes: 2021-06-17 - General - ROS Discourse
-
[Biggs] Safety
- Considering shutting down this working group.
- Although the two invited talks held so far have been well attended relative to previous WG meetings, the response to invitations to talk has been less than required to maintain a series of talks.
- KAT – probably need a guide for working groups that are languishing.
-
[Deray] Security
- No meeting this month, quick summer break.
-
[Blasdel/Knapp] Tooling
- Minutes
- rosbag2 Foxy-compatible
foxy-futurebranch has been finalized, users can build it from source in their workspace. Details in the README as well as on the foxy branch. - Discussing whether it is worthwhile to enable clang-tidy on rosbag2 for static analysis. It’s very noisy, but has some high-value checks.
- Researching use of ros2doc to generate documentation for rosbag2, no progress yet but excited to continue
- Priority work: reducing flaky tests, increasing test stability
- Ongoing work: arbitrary jump/seek during read
- Hot topic: storing message definitions in rosbag2 (overlap with WebTools WG discussion, also a hot topic there). Bringing up at next Middleware WG meeting, and will open a ticket for discussion before then (if it doesn’t already exist)
- In planning: bag reshaping - take as input one or more bags with any read configuration, and write back out as one or more bags using any write configuration. Will allow for merge, split, conversion between storage compression serialization formats
-
[Knapp] WebTools
- Minutes
- Had second and third meetings, have chosen a recurring semiweekly time
- Presentations:
- Foxglove.dev - Electron/browser-based visualizer suite, fully open-source fork of WebViz project started by former Cruise team
- Rover Mini - Rover robotics interested in web-tech frontend for controlling new robot, want to apply it to their freshly-announced Mini robot
- Dheera Venkatraman - ROSboard - lightweight Jquery-based browser visualizer. And ROSShow: terminal-based ROS visualizer. Can view camera output as colored Unicode blocks in the terminal!! Wild stuff.
- Hot topic: rosbag2 storage formats for easier browser-based parsing
- Hot topic: ROS 2 message definitions on the wire. To subscribe to arbitrary topics without having to “build it in” to web frontend. To use for plotting and message contents display. Applies to rosbag2 parsing as well.
- No concrete roadmap yet decided - but based on attendance and interest, may be focusing on unblocking and “standardizing”/“commonizing” features of Foxglove Studio as a web-tech RViz alternative
-
3 posts - 2 participants
ROS Discourse General: [Nav2] A Comparison of Modern General-Purpose Visual SLAM Approaches
Hi all,
Its your friendly neighborhood navigator here. I wanted to tell you about some work spearheaded by my colleague @amerzlyakov in doing comparisons of modern VSLAM techniques for the purposes of service robotics. This paper was accepted to IROS 2021, but you can find our pre-print version on Arxiv.
If you’re doing VSLAM work, or interested in it, please take a look and always happy if you cite it if you find this analysis useful  . We conclude that of all the modern and openly available VSLAM techniques available, OpenVSLAM is the overall best option based on general service robot requirements. If you have hard time synchronized IMUs, ORB-SLAM3 is worth also evaluating, but even in that situation, OpenVSLAM had additional robustness in edge cases that you’d more commonly find in an industrial setting.
. We conclude that of all the modern and openly available VSLAM techniques available, OpenVSLAM is the overall best option based on general service robot requirements. If you have hard time synchronized IMUs, ORB-SLAM3 is worth also evaluating, but even in that situation, OpenVSLAM had additional robustness in edge cases that you’d more commonly find in an industrial setting.
VSLAM still has some ways to go. Few studies have really gone into long-term deployment to analyze their stability with changes over weeks, months, or years. That would be the best major hurtle to removing LIDARs from our robots – or reducing them into safety sensors with significantly reduced range and cost. OpenVSLAM may be able to handle such situations, but that is left to future work.
There are on-going efforts in the Nav2 working group to develop a functional VSLAM technique for mobile robot navigation and tight integration with the ROS Nav2 stack. This would not replace support for 2D SLAM in Nav2, but it would be offered in addition to, with equal support and reliability. If this interests you, please reach out. We are working on this as a cross-collaboration between Samsung Research and LP-Research. We could always use another set of hands or some smart minds interested in making this technology “really work” today.
Happy SLAMing,
Steve
10 posts - 6 participants
ROS Discourse General: Talk:Usingzero-copy data transfer in ROS 2
We at Apex.AI recently integrated Eclipse iceoryx in ROS 2 Galactic. This allows application developers to use zero- copy memory transfer (under certain conditions). This is of particular interest if large data such has point clouds has to be transmitted.
This talk Using zero-copy data transfer in ROS 2 - Virtual Eclipse Community Meetup - Crowdcast will show how to use shared memory in ROS 2 by enabling iceoryx in CycloneDDS.
Everyone is welcome to join or contact me for additional questions.
Date: 20 July 2021, 17:00 CEST (tomorrow)
21 posts - 9 participants
ROS Discourse General: Some questions about Installation ROS on macOS
Good morning,
I am relatively new here at ROS and have a few general questions about installing ROS on macOS, for example.
I was able to read the following in the documentation today:
————————————————————————————————————— snip —
brew install python@3.8
brew unlink python
brew link --force python@3.8
brew install asio tinyxml2
brew install tinyxml eigen pcre poco
brew install opencv
brew install openssl
echo “export OPENSSL_ROOT_DIR=$(brew --prefix openssl)” >> ~/.bashrc
brew install qt freetype assimp
brew install console_bridge
brew install log4cxx spdlog
brew install cunit
————————————————————————————————————— snip —
For example, I already have Python 3.9 and 3.10 installed, as well as OpenSSL → which release versions are supported / required by ROS? How do I get the latest version of ROS 2 or the “rollout”?
With best regards from Berlin
2 posts - 2 participants
ROS Industrial: ROS2 Easy-to-Adopt Perception and Manipulation Modules Open Sourced
ROS-Industrial has developed the easy_perception_deployment (EPD) & easy_manipulation_deployment (EPD) ROS2 packages to accelerate the industries' effort in training and deployment of custom CV models and also provide a modular and configurable manipulation pipeline for pick and place tasks respectively. The overall EPD-EMD pipeline is shown in Figure 1.
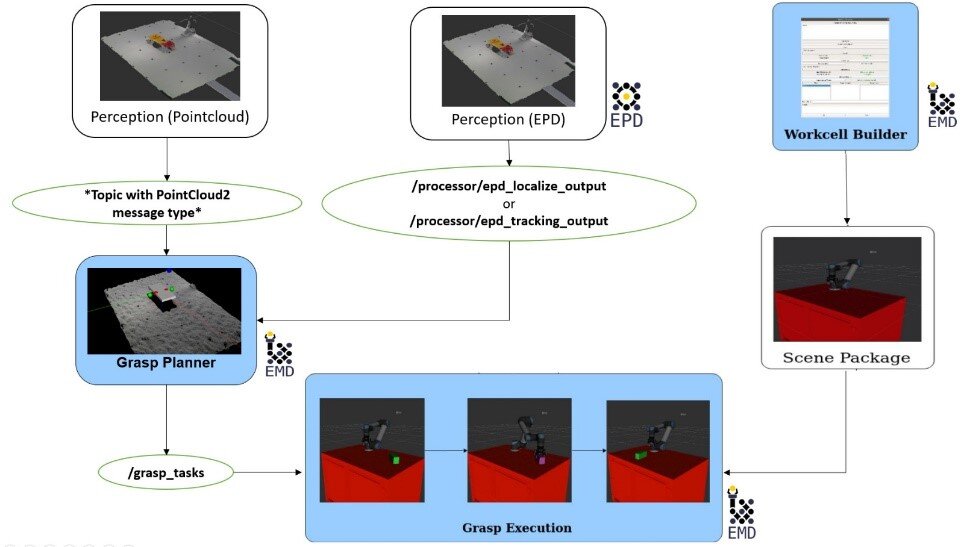
Figure 1. Overall EPD-EMD Pipeline
The EPD ROS2 package helps accelerate the training and deployment of Computer Vision (CV) models for industrial use. The package provides a user-friendly graphical user interface (GUI) as shown in Figure 2 to reduce the time and knowledge barrier so even end-users with no prior experience in programming would be able to use the package too. It relies on open-standard ONNX AI models, hence eliminating the overreliance on any given ML library such as Tensorflow, PyTorch, or MXNet.
Figure 2. Startup GUI of EPD
EPD itself runs on a deep-learning model as a ROS2 interface engine and outputs object information such as the object name and location in a custom ROS2 message. This can be used for use cases such as object classification, localization, and tracking. To train a model for custom object detection, all a user needs to prepare are the following:
- .jpgs/.pngs Image Dataset of custom objects. (Approx. 30 images per object required)
- .txt Class Labels List
The expected output will be:
- .onnx trained AI model
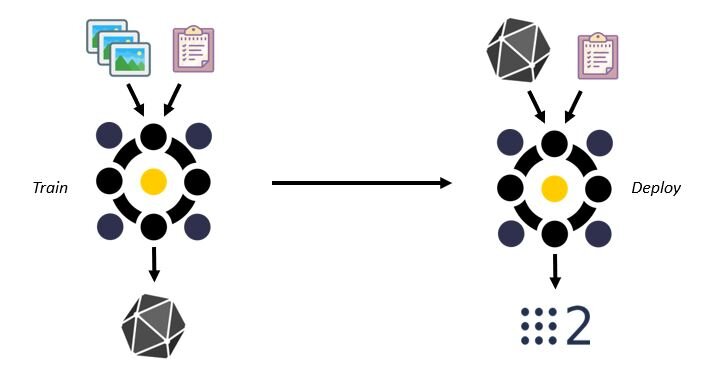
Figure 3. EPD Training to Deployment Input & Output
To cater to the different use cases for different end-user’s requirements, the package also allows for customizability in 3 different profiles.
• Profile 1 (P1) – fastest, but least accurate
• Profile 2 (P2) – mid-tier
• Profile 3 (P3) – slower, but most precise output
EPD caters to 5 common industrial tasks achievable via Computer Vision.
- Classification (P1, P2, P3)
- Counting (P2, P3)
- Color-Matching (P2, P3)
- Localization/Measurement (P3)
- Localization/Measurement/Tracking (P3)
Figure 4. An output of EPD at Profile 3, with OIbject Localization and operating at 2 FPS
The EMD ROS2 Package is a modular and easy to deploy ROS2 manipulation pipeline that integrates perception elements to establish an end-to-end industrial pick and place task. Overall, the pipeline comprises 3 main components in which are:
- Workcell Builder
The Workcell builder as shown in Figure 5 essentially provides a user-friendly graphical user interface (GUI) to allow users to create a representation of their robot task space to provide a simulation of the same robot environment as well as the initial state for trajectory planning using motion planning frameworks like MoveIt2.
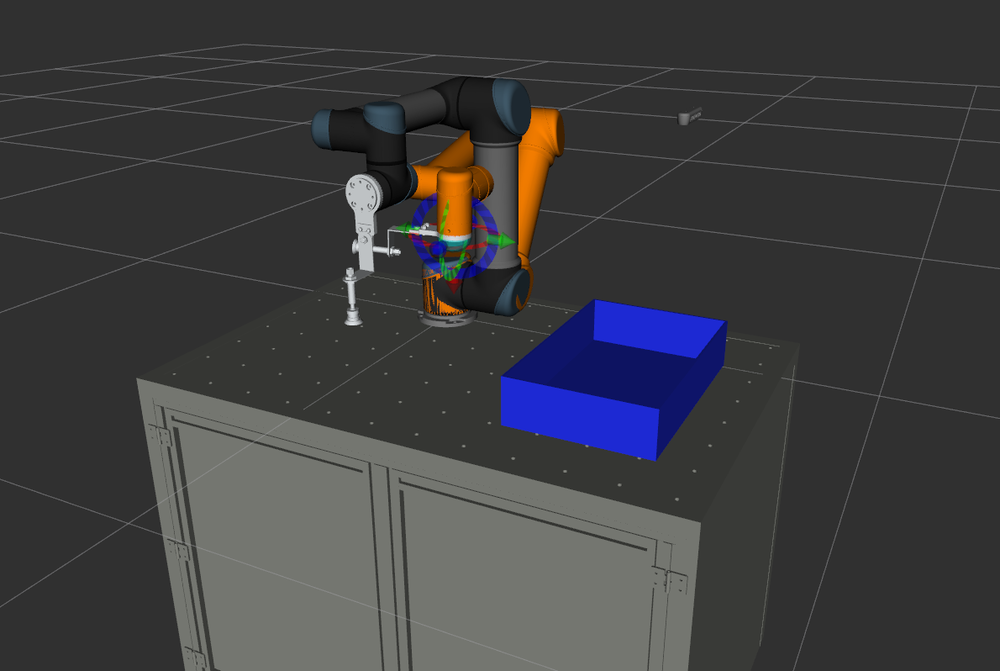
Figure 5. Workcell Builder from EMD
2. Grasp Planner
The Grasp Planner subscribes to a topic published by a given perception source and outputs a specific grasp pose for the end-effector using a novel, algorithmic depth-based method. The generated pose is then published as a ROS2 topic. As shown in Figure 7, The grasp planner currently supports and provides a 4 degree-of-freedom (DOF) pose for both multi-finger and suction array end effectors, apart from the traditional two-finger and single suction cup grippers.
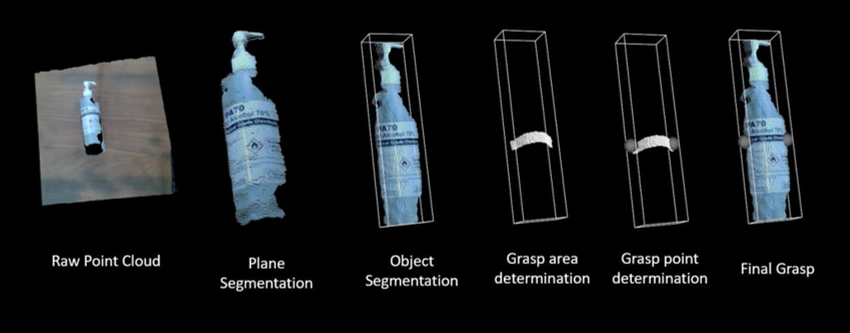
Figure 6. POINCLOUD TO GRASP POINT GENERATION

Figure 6. Grasp Planner
It aims to eliminate the pain points that users face when deploying machine learning-based grasp planners such as:
• Time Taken for Training & Tedious Dataset Acquisition and Labelling
Current datasets available such as the Cornell Grasping Dataset and Jacquard Grasping Dataset generally account for two-finger grippers and training on generic objects. For customized use cases, datasets need to be generated and labeled manually which requires a lot of time. Semantic description of multi-finger grippers and suction arrays may be hard to determine as well.
• Lack of On-The-Fly End Effector Switching
In a high mix, low volume pick-and-place task, different end effectors are required to be switched around to cater for the grasping of different types of objects. The changing of end efforts would translate for users to re-collect a new dataset, re-label and re-train the dataset and models before deploying them.
3. Grasp Execution
The Grasp Execution was developed to allow for a robust path planning process in navigating the robot to the target location for the grasping action. It serves as a simulator that uses path planners from the motion framework MoveIt2, as well as the output generated by the Grasp Planner. Figure 7 demonstrates that various items are picked successfully.
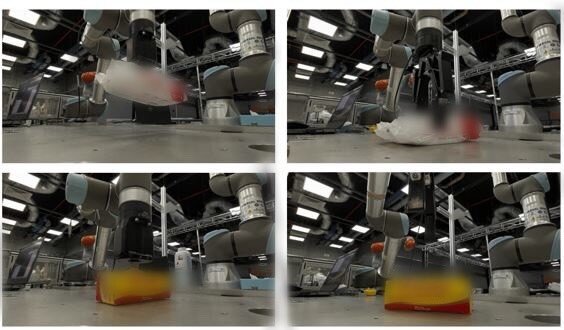
Figure 7. Grasp Execution on different objects using different end-effectors
Overall, it benefits users by providing seamless integration with the grasp planner, as the grasp execution package communicates with the grasp planner through subscribing to a single ROS2 topic with the GraspTask.msg type. Apart from this, the grasp execution package also takes into account dynamic safety, which is important as collaborative robots often operate closely in a dynamic environment with human operators and other obstacles as well.
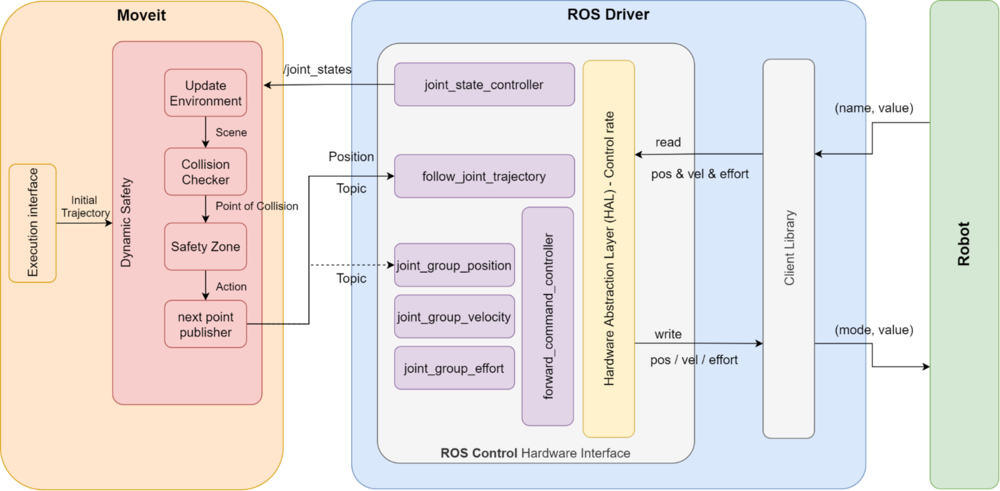
FIGURE 8. Improved grasp execution - dynamic safety architecture
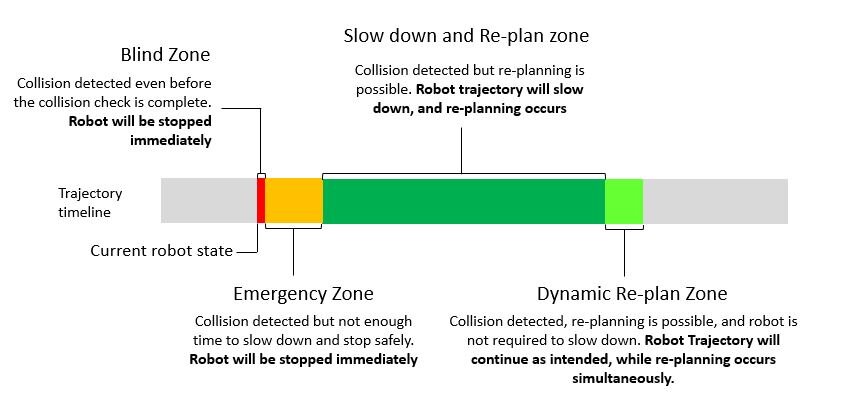
FIGURE 9. dynamic safety zones
There is a need for the robot to be equipped with such capabilities to address safety concerns and detect possible collisions in its trajectory execution to avoid any obstacles. Users are provided with a vision based dynamic collision avoidance capability through the use of Octomaps, whereby when a collision has been deemed to occur within the trajectory of the robot, the dynamic safety module will be triggered to either stop the robot or account for a dynamic replanning of its trajectory given the new obstacles within the environment.
Both of these packages have been formally released and open sourced on the ROS-Industrial github repository, and the team would also like to acknowledge the Singapore Government for their vision and support in funding this R&D project “Accelerating Open Source Technologies for Cross Domain Adoption through Robot Operating System (ROS), supported by the National Robotics Programme (NRP).
ROS Discourse General: New packages for Galactic Geochelone 2021-07-16
This sync brings 158 new packages to Galactic and updates 71 others. Thanks very much to the many developers that were a part of this effort, including the 56 maintainers listed below.
ros/rosdistro tag: galactic/2021-07-16
ros2/ros2 tag: release-galactic-20210716
Added Packages [158]:
- ros-galactic-ament-cmake-catch2: 1.2.0-1
- ros-galactic-cascade-lifecycle-msgs: 1.0.0-2
- ros-galactic-cascade-lifecycle-msgs-dbgsym: 1.0.0-2
- ros-galactic-control-toolbox: 2.0.2-1
- ros-galactic-control-toolbox-dbgsym: 2.0.2-1
- ros-galactic-costmap-queue: 1.0.6-1
- ros-galactic-dwb-core: 1.0.6-1
- ros-galactic-dwb-core-dbgsym: 1.0.6-1
- ros-galactic-dwb-critics: 1.0.6-1
- ros-galactic-dwb-critics-dbgsym: 1.0.6-1
- ros-galactic-dwb-plugins: 1.0.6-1
- ros-galactic-dwb-plugins-dbgsym: 1.0.6-1
- ros-galactic-dynamixel-sdk: 3.7.40-1
- ros-galactic-dynamixel-sdk-custom-interfaces: 3.7.40-1
- ros-galactic-dynamixel-sdk-custom-interfaces-dbgsym: 3.7.40-1
- ros-galactic-dynamixel-sdk-dbgsym: 3.7.40-1
- ros-galactic-dynamixel-sdk-examples: 3.7.40-1
- ros-galactic-dynamixel-sdk-examples-dbgsym: 3.7.40-1
- ros-galactic-geometric-shapes: 2.1.0-2
- ros-galactic-geometric-shapes-dbgsym: 2.1.0-2
- ros-galactic-launch-system-modes: 0.8.0-1
- ros-galactic-libmavconn: 2.0.3-1
- ros-galactic-libmavconn-dbgsym: 2.0.3-1
- ros-galactic-librealsense2: 2.48.0-1
- ros-galactic-librealsense2-dbgsym: 2.48.0-1
- ros-galactic-mavros: 2.0.3-1
- ros-galactic-mavros-dbgsym: 2.0.3-1
- ros-galactic-mavros-msgs: 2.0.3-1
- ros-galactic-mavros-msgs-dbgsym: 2.0.3-1
- ros-galactic-menge-vendor: 1.0.0-1
- ros-galactic-menge-vendor-dbgsym: 1.0.0-1
- ros-galactic-moveit-common: 2.2.0-1
- ros-galactic-moveit-core: 2.2.0-1
- ros-galactic-moveit-core-dbgsym: 2.2.0-1
- ros-galactic-moveit-msgs: 2.1.0-1
- ros-galactic-moveit-msgs-dbgsym: 2.1.0-1
- ros-galactic-moveit-plugins: 2.2.0-1
- ros-galactic-moveit-resources: 2.0.2-1
- ros-galactic-moveit-resources-fanuc-description: 2.0.2-1
- ros-galactic-moveit-resources-fanuc-moveit-config: 2.0.2-1
- ros-galactic-moveit-resources-panda-description: 2.0.2-1
- ros-galactic-moveit-resources-panda-moveit-config: 2.0.2-1
- ros-galactic-moveit-resources-pr2-description: 2.0.2-1
- ros-galactic-moveit-ros-occupancy-map-monitor: 2.2.0-1
- ros-galactic-moveit-ros-occupancy-map-monitor-dbgsym: 2.2.0-1
- ros-galactic-moveit-simple-controller-manager: 2.2.0-1
- ros-galactic-moveit-simple-controller-manager-dbgsym: 2.2.0-1
- ros-galactic-nao-interfaces: 0.0.2-1
- ros-galactic-nao-interfaces-dbgsym: 0.0.2-1
- ros-galactic-nav-2d-utils: 1.0.6-1
- ros-galactic-nav-2d-utils-dbgsym: 1.0.6-1
- ros-galactic-nav2-amcl: 1.0.6-1
- ros-galactic-nav2-amcl-dbgsym: 1.0.6-1
- ros-galactic-nav2-behavior-tree: 1.0.6-1
- ros-galactic-nav2-behavior-tree-dbgsym: 1.0.6-1
- ros-galactic-nav2-bringup: 1.0.6-1
- ros-galactic-nav2-bt-navigator: 1.0.6-1
- ros-galactic-nav2-bt-navigator-dbgsym: 1.0.6-1
- ros-galactic-nav2-controller: 1.0.6-1
- ros-galactic-nav2-controller-dbgsym: 1.0.6-1
- ros-galactic-nav2-core: 1.0.6-1
- ros-galactic-nav2-costmap-2d: 1.0.6-1
- ros-galactic-nav2-costmap-2d-dbgsym: 1.0.6-1
- ros-galactic-nav2-dwb-controller: 1.0.6-1
- ros-galactic-nav2-lifecycle-manager: 1.0.6-1
- ros-galactic-nav2-lifecycle-manager-dbgsym: 1.0.6-1
- ros-galactic-nav2-map-server: 1.0.6-1
- ros-galactic-nav2-map-server-dbgsym: 1.0.6-1
- ros-galactic-nav2-navfn-planner: 1.0.6-1
- ros-galactic-nav2-navfn-planner-dbgsym: 1.0.6-1
- ros-galactic-nav2-planner: 1.0.6-1
- ros-galactic-nav2-planner-dbgsym: 1.0.6-1
- ros-galactic-nav2-recoveries: 1.0.6-1
- ros-galactic-nav2-recoveries-dbgsym: 1.0.6-1
- ros-galactic-nav2-regulated-pure-pursuit-controller: 1.0.6-1
- ros-galactic-nav2-regulated-pure-pursuit-controller-dbgsym: 1.0.6-1
- ros-galactic-nav2-rviz-plugins: 1.0.6-1
- ros-galactic-nav2-rviz-plugins-dbgsym: 1.0.6-1
- ros-galactic-nav2-smac-planner: 1.0.6-1
- ros-galactic-nav2-smac-planner-dbgsym: 1.0.6-1
- ros-galactic-nav2-system-tests: 1.0.6-1
- ros-galactic-nav2-system-tests-dbgsym: 1.0.6-1
- ros-galactic-nav2-util: 1.0.6-1
- ros-galactic-nav2-util-dbgsym: 1.0.6-1
- ros-galactic-nav2-waypoint-follower: 1.0.6-1
- ros-galactic-nav2-waypoint-follower-dbgsym: 1.0.6-1
- ros-galactic-navigation2: 1.0.6-1
- ros-galactic-object-recognition-msgs: 2.0.0-1
- ros-galactic-object-recognition-msgs-dbgsym: 2.0.0-1
- ros-galactic-openvslam: 0.2.3-3
- ros-galactic-openvslam-dbgsym: 0.2.3-3
- ros-galactic-plotjuggler: 3.2.1-2
- ros-galactic-plotjuggler-dbgsym: 3.2.1-2
- ros-galactic-plotjuggler-msgs: 0.1.2-1
- ros-galactic-plotjuggler-msgs-dbgsym: 0.1.2-1
- ros-galactic-point-cloud-msg-wrapper: 1.0.7-1
- ros-galactic-popf: 0.0.13-1
- ros-galactic-popf-dbgsym: 0.0.13-1
- ros-galactic-qpoases-vendor: 3.2.3-1
- ros-galactic-random-numbers: 2.0.1-1
- ros-galactic-random-numbers-dbgsym: 2.0.1-1
- ros-galactic-rc-reason-clients: 0.2.1-1
- ros-galactic-rc-reason-msgs: 0.2.1-1
- ros-galactic-rc-reason-msgs-dbgsym: 0.2.1-1
- ros-galactic-rcdiscover: 1.1.2-1
- ros-galactic-rcdiscover-dbgsym: 1.1.2-1
- ros-galactic-rclcpp-cascade-lifecycle: 1.0.0-2
- ros-galactic-rclcpp-cascade-lifecycle-dbgsym: 1.0.0-2
- ros-galactic-rmf-building-map-msgs: 1.2.0-1
- ros-galactic-rmf-building-map-msgs-dbgsym: 1.2.0-1
- ros-galactic-rmf-charger-msgs: 1.3.0-1
- ros-galactic-rmf-charger-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-cmake-uncrustify: 1.2.0-1
- ros-galactic-rmf-dispenser-msgs: 1.3.0-1
- ros-galactic-rmf-dispenser-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-door-msgs: 1.3.0-1
- ros-galactic-rmf-door-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-fleet-msgs: 1.3.0-1
- ros-galactic-rmf-fleet-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-ingestor-msgs: 1.3.0-1
- ros-galactic-rmf-ingestor-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-lift-msgs: 1.3.0-1
- ros-galactic-rmf-lift-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-task-msgs: 1.3.0-1
- ros-galactic-rmf-task-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-traffic: 1.3.0-1
- ros-galactic-rmf-traffic-dbgsym: 1.3.0-1
- ros-galactic-rmf-traffic-msgs: 1.3.0-1
- ros-galactic-rmf-traffic-msgs-dbgsym: 1.3.0-1
- ros-galactic-rmf-utils: 1.3.0-1
- ros-galactic-rmf-visualization-msgs: 1.2.0-1
- ros-galactic-rmf-visualization-msgs-dbgsym: 1.2.0-1
- ros-galactic-rmf-workcell-msgs: 1.3.0-1
- ros-galactic-rmf-workcell-msgs-dbgsym: 1.3.0-1
- ros-galactic-robot-localization: 3.2.3-1
- ros-galactic-robot-localization-dbgsym: 3.2.3-1
- ros-galactic-rplidar-ros: 2.0.2-1
- ros-galactic-rplidar-ros-dbgsym: 2.0.2-1
- ros-galactic-slam-toolbox: 2.5.0-2
- ros-galactic-slam-toolbox-dbgsym: 2.5.0-2
- ros-galactic-soccer-vision-msgs: 0.0.1-1
- ros-galactic-soccer-vision-msgs-dbgsym: 0.0.1-1
- ros-galactic-srdfdom: 2.0.2-1
- ros-galactic-srdfdom-dbgsym: 2.0.2-1
- ros-galactic-stubborn-buddies: 1.0.0-1
- ros-galactic-stubborn-buddies-dbgsym: 1.0.0-1
- ros-galactic-stubborn-buddies-msgs: 1.0.0-1
- ros-galactic-stubborn-buddies-msgs-dbgsym: 1.0.0-1
- ros-galactic-test-launch-system-modes: 0.8.0-1
- ros-galactic-tf-transformations: 1.0.2-1
- ros-galactic-turtlebot3-msgs: 2.2.2-3
- ros-galactic-turtlebot3-msgs-dbgsym: 2.2.2-3
- ros-galactic-tvm-vendor: 0.7.3-1
- ros-galactic-tvm-vendor-dbgsym: 0.7.3-1
- ros-galactic-warehouse-ros: 2.0.3-1
- ros-galactic-warehouse-ros-dbgsym: 2.0.3-1
- ros-galactic-warehouse-ros-mongo: 2.0.2-1
- ros-galactic-warehouse-ros-mongo-dbgsym: 2.0.2-1
Updated Packages [71]:
- ros-galactic-ament-index-cpp: 1.0.6-1 → 1.2.0-1
- ros-galactic-ament-index-cpp-dbgsym: 1.0.6-1 → 1.2.0-1
- ros-galactic-ament-index-python: 1.0.6-1 → 1.2.0-1
- ros-galactic-control-msgs: 2.5.0-4 → 3.0.0-2
- ros-galactic-control-msgs-dbgsym: 2.5.0-4 → 3.0.0-2
- ros-galactic-cyclonedds: 0.8.0-4 → 0.8.0-5
- ros-galactic-cyclonedds-dbgsym: 0.8.0-4 → 0.8.0-5
- ros-galactic-dwb-msgs: 1.0.0-2 → 1.0.6-1
- ros-galactic-dwb-msgs-dbgsym: 1.0.0-2 → 1.0.6-1
- ros-galactic-fmi-adapter: 2.1.0-2 → 2.1.1-1
- ros-galactic-fmi-adapter-dbgsym: 2.1.0-2 → 2.1.1-1
- ros-galactic-fmi-adapter-examples: 2.1.0-2 → 2.1.1-1
- ros-galactic-libphidget22: 2.1.0-2 → 2.2.0-1
- ros-galactic-libphidget22-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-mavlink: 2021.5.5-1 → 2021.7.7-1
- ros-galactic-nav-2d-msgs: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav-2d-msgs-dbgsym: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav2-common: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav2-gazebo-spawner: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav2-msgs: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav2-msgs-dbgsym: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav2-voxel-grid: 1.0.0-2 → 1.0.6-1
- ros-galactic-nav2-voxel-grid-dbgsym: 1.0.0-2 → 1.0.6-1
- ros-galactic-osrf-testing-tools-cpp: 1.3.2-3 → 1.4.0-2
- ros-galactic-osrf-testing-tools-cpp-dbgsym: 1.3.2-3 → 1.4.0-2
- ros-galactic-phidgets-accelerometer: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-accelerometer-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-analog-inputs: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-analog-inputs-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-api: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-api-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-digital-inputs: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-digital-inputs-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-digital-outputs: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-digital-outputs-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-drivers: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-gyroscope: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-gyroscope-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-high-speed-encoder: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-high-speed-encoder-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-ik: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-magnetometer: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-magnetometer-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-motors: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-motors-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-msgs: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-msgs-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-spatial: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-spatial-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-temperature: 2.1.0-2 → 2.2.0-1
- ros-galactic-phidgets-temperature-dbgsym: 2.1.0-2 → 2.2.0-1
- ros-galactic-rclc: 1.0.1-2 → 2.0.1-1
- ros-galactic-rclc-dbgsym: 1.0.1-2 → 2.0.1-1
- ros-galactic-rclc-examples: 1.0.1-2 → 2.0.1-1
- ros-galactic-rclc-examples-dbgsym: 1.0.1-2 → 2.0.1-1
- ros-galactic-rclc-lifecycle: 1.0.1-2 → 2.0.1-1
- ros-galactic-rclc-lifecycle-dbgsym: 1.0.1-2 → 2.0.1-1
- ros-galactic-rmw-cyclonedds-cpp: 0.22.2-1 → 0.22.3-1
- ros-galactic-rmw-cyclonedds-cpp-dbgsym: 0.22.2-1 → 0.22.3-1
- ros-galactic-rmw-gurumdds-cpp: 2.1.5-1 → 2.1.7-1
- ros-galactic-rmw-gurumdds-cpp-dbgsym: 2.1.5-1 → 2.1.7-1
- ros-galactic-rmw-gurumdds-shared-cpp: 2.1.5-1 → 2.1.7-1
- ros-galactic-rmw-gurumdds-shared-cpp-dbgsym: 2.1.5-1 → 2.1.7-1
- ros-galactic-rqt-publisher: 1.1.2-1 → 1.1.3-1
- ros-galactic-system-modes: 0.7.1-3 → 0.8.0-1
- ros-galactic-system-modes-dbgsym: 0.7.1-3 → 0.8.0-1
- ros-galactic-system-modes-examples: 0.7.1-3 → 0.8.0-1
- ros-galactic-system-modes-examples-dbgsym: 0.7.1-3 → 0.8.0-1
- ros-galactic-system-modes-msgs: 0.7.1-3 → 0.8.0-1
- ros-galactic-system-modes-msgs-dbgsym: 0.7.1-3 → 0.8.0-1
- ros-galactic-xacro: 2.0.2-3 → 2.0.6-1
Removed Packages [0]:
Thanks to all ROS maintainers who make packages available to the ROS community. The above list of packages was made possible by the work of the following maintainers:
- Aaron Chong
- Anas M’chichou
- Apex.AI, Inc.
- Arjo Chakravarty
- Arne Nordmann
- Audrow Nash
- Bence Magyar
- Brian Wilcox
- Carl Delsey
- Carlos Orduno
- Dave Coleman
- David V. Lu!!
- Davide Faconti
- Dirk Thomas
- Eclipse Foundation, Inc.
- Erik Boasson
- Felix Ruess
- Francisco Martin
- Francisco Martin Rico
- Geoffrey Biggs
- Grey
- Hunter L. Allen
- Jan Staschulat
- Josh Whitley
- Luca Della Vedova
- Marco A. Gutiérrez
- Martin Günther
- Michael Ferguson
- Michael Görner
- Michael Jeronimo
- Mike Lautman
- Mohammad Haghighipanah
- Morgan Quigley
- MoveIt Release Team
- Ralph Lange
- Robert Haschke
- Rushyendra Maganty
- Sergey Dorodnicov
- Shao Guoliang
- Steve Macenski
- Tom Moore
- Tyler Weaver
- Vincent Rabaud
- Vladimir Ermakov
- Will Son
- William Woodall
- Yadunund Vijay
- Youngjin Yun
- daf
- fmrico
- ijnek
- lkumarbe
- ruess
- willson
- yadu
- ymd-stella
1 post - 1 participant
ROS Discourse General: ROS News for the Week of 7/12/2021
ROS News for the Week of 7/12/2021

Introducing ROSboard: Web-based visualizations for ROS1 and ROS2

Robotics Science and Systems Conference was held this week. I saw a ton of great talks and papers and I only scratched the surface for this weeks update. If you saw some interesting work please post it in the comments.
Events
- 7/21/2021 ROS Seattle Meetup
- 7/25/2021 Black in Robotics Build a ROS 2 Robot
- 7/28/2021 Ignition Community Meeting – Topic Ignition vs. Gazebo
- 8/18/2021 ROS Industrial AP Workshop
- 9/21/2021 DARPA SubT Final
- 9/14/2021 PX4 Dev Summit
- 9/16/2021 ROSConJp
- 10/16/2021 Self Racing Cars Bay Area
- 10/21/2021 ROSCon is Back!
News
- Computer Vision from the 90s
- “The Future of Robot Perception: Recent Progress and Opportunities Beyond SLAM”
- Square Track Robot
- The Demise Of Robotics Companies: Learning From Past Mistakes
- WSJ on Fetch Acquisition
- Ars Technica: No Driver? No Problem!
- Open Dataset: Urban and Forest Areas from a Mapping Backpack
- RSS: Visual Navigation for Agriculture Robots
- RSS: Rapid Motor Adaptation for Legged Robots
- AstroBee gets Fingers
- micro-ROS runs on CAPRA Robotics
- DARPA Announces Teams Qualifying for Subterranean Challenge Virtual Competition Finals
- Great CVPR 2021 Summary
- Tesla “Full Self Driving” Version 9
- Abundant Robotics: Not so Abundant Funding
- Robot Pizzaria in Paris
- Self-Driving Vehicle Company Aurora (formerly Uber) Gets SPAC’d
ROS Related
- CyPhySS 2021 talk on CHAMP
- ROSCon JP Call for Proposals
- Simple ROS 2 Examples by Francisco
- Circuit Cellar: Intro to ROS
- ROS for Parrot Drones
- ROS Package for Visual Odometry for Event Cameras
- Web-Based ROS User Interface
- Dynamic Logistics Warehouse Gazebo World
- New ROS 2 Book (Japanese)
- SOBY ROS Robot
- ROS RedBoard Driver
- ROS 2 YAML Parameters
- Diff Drive Bot using Nav2, ROS 2 and Ignition Gazebo
- Introducing ROSboard: Web-based visualizations for ROS1 and ROS2
- MyCobot Tutorial
- ROS 2 Rolling Ridley – 63 New and 56 Updated Packages
- Best Practices for Naming Robot Arm Joints
- ROS Developer Day 2021 Videos
- Assisted Teleop: Call for Opinions
- Annotate Camera Images in Foxglove Studio
- Foxglove ROS 2 Bag Playback Tool
- WebTools WG Meeting
- Conway’s Game of Life in RVIZ
QUESTIONS
- How to Keep Track of Third Party ROS Packages?
-
Best ROS 2 Launch File Documentation?
- If you have real world experience with ROS 2 launch files please contact @Katherine_Scott. We need help to improve the launch file documentation.
- Guide for Multi Robot Simulations in Gazebo?
1 post - 1 participant